




เจ้าของนวัตกรรม
นาย ณัฏฐวุฒิ อังศรีสุรพร
นักศึกษา
Details
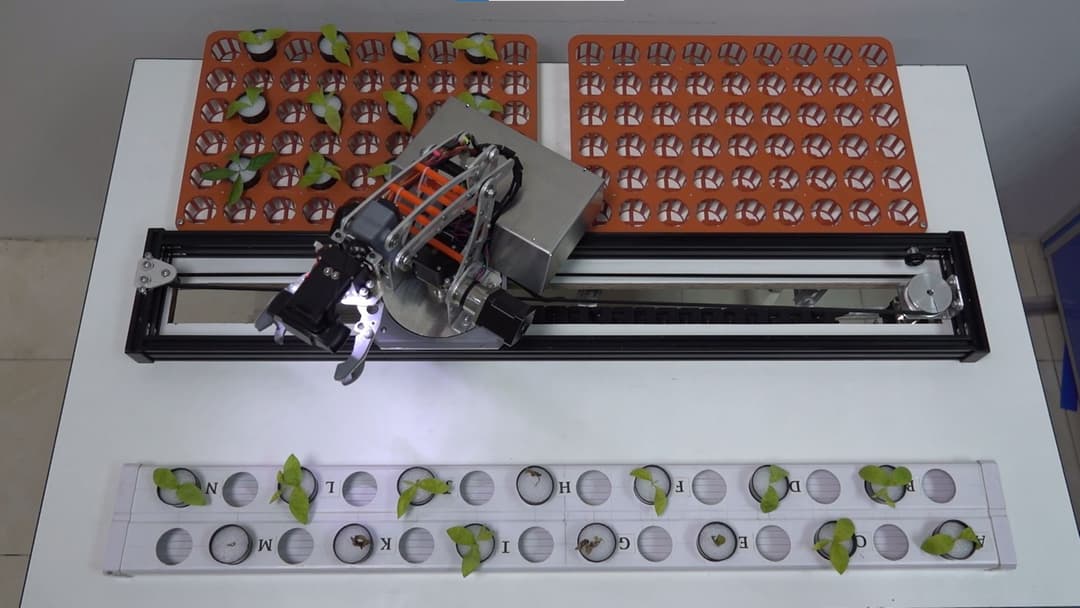
แขนกลระบบรางเพื่อการเกษตรอัจฉริยะถูกพัฒนาขึ้นเพื่อเพิ่มประสิทธิภาพการผลิตและลดต้นทุน โดยใช้ระบบรางที่มีความแม่นยำสูงในการทำงานเกษตรกรรม เช่น การปลูกพืช การคัดแยก และการเก็บเกี่ยว เพื่อลดการใช้แรงงานมนุษย์และส่งเสริมความยั่งยืนในภาคการเกษตร
การเกษตรอัจฉริยะ (Smart Agriculture) ได้รับการพัฒนาอย่างรวดเร็วในช่วงไม่กี่ปีที่ผ่านมา โดยเฉพาะการนำเทคโนโลยีหุ่นยนต์และระบบอัตโนมัติเข้ามาใช้ เพื่อเพิ่มประสิทธิภาพในการผลิต เเละลดต้นทุน โดยกระดับคุณภาพการทำเกษตรกรรมในปัจจุบัน ซึ่งนวัตกรรมที่สำคัญในด้านนี้คือ แขนกลระบบราง ซึ่งถูกออกแบบเพื่อเพิ่มประสิทธิภาพในการทำงาน โดยใช้ระบบรางที่มีความแม่นยำและประสิทธิภาพสูง การใช้งานของแขนกลนี้ครอบคลุมหลายกระบวนการ เช่น:
- การปลูกพืช
- การคัดเเยก
- การดูแลรักษา
- การเก็บเกี่ยว
- การจัดการทรัพยากรต่างๆ
ผลการศึกษาพบว่า การใช้แขนกลระบบรางในภาคการเกษตรสามารถช่วยเพิ่มประสิทธิภาพการทำงาน ลดต้นทุนการผลิต และช่วยลดผลกระทบต่อสิ่งแวดล้อมได้อย่างมีประสิทธิภาพ โดยการใช้หุ่นยนต์ในกระบวนการเกษตรสามารถลดการปนเปื้อน ลดความเสี่ยงที่จะทำให้พืชเสียหาย ทำให้การเกษตรมีความยั่งยืนมากขึ้น นอกจากนี้ยังสามารถเพิ่มความแม่นยำในการดำเนินงานในพื้นที่จำกัดหรือฟาร์มที่มีการปลูกพืชหลากหลายชนิด


Objective
เพื่อพัฒนาเทคโนโลยีสำหรับอุตสาหกรรมการเกษตรของประเทศไทย และยกระดับระบบการทำงานในภาคการเกษตรให้มีประสิทธิภาพมากยิ่งขึ้น
- เพื่อพัฒนาเทคโนโลยีสำหรับอุตสาหกรรมการเกษตรของประเทศไทย
- เพื่อยกระดับระบบการทำงานในภาคการเกษตรให้มีประสิทธิภาพมากขี้น