




Innovation Owner
Mr. NATTHAWUTH ANGSRISURAPORN
Student
Details
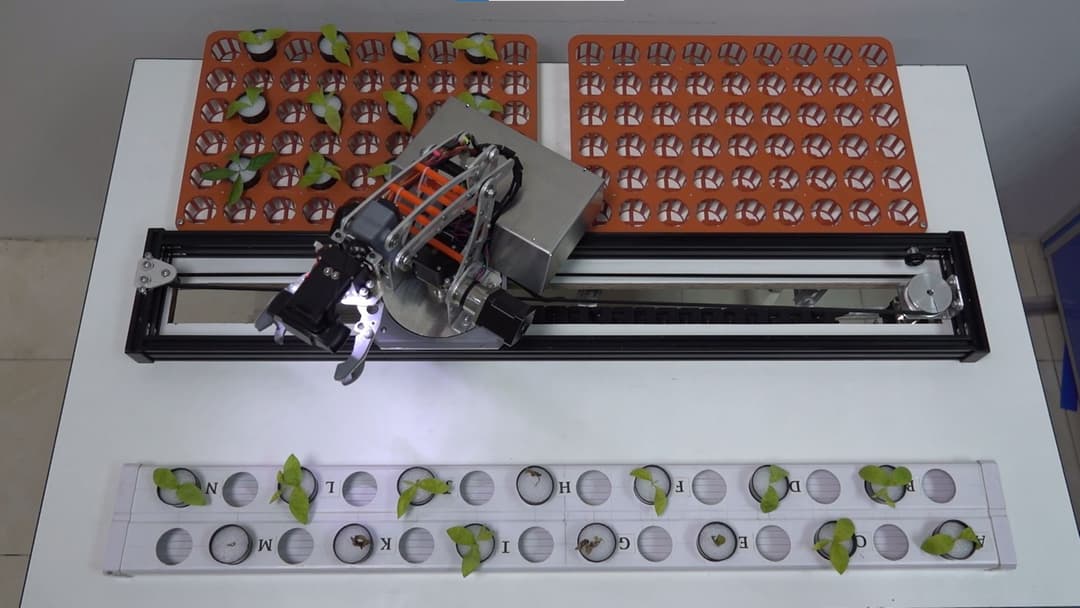
The Smart Agricultural Rail Robotics System is designed to enhance production efficiency and reduce costs through high-precision rail technology. It automates tasks such as planting, sorting, and harvesting, reducing human labor and promoting sustainable agricultural practices.
Smart Agriculture has rapidly developed in recent years, particularly with the integration of robotics and automation technologies to improve production efficiency and reduce costs, thereby enhancing the quality of current agricultural practices. A key innovation in this area is the rail-based robotic arm, designed to enhance work efficiency using a rail system with high precision and effectiveness. The application of this robotic arm covers various processes, such as:
- Planting
- Sorting
- Maintenance
- Harvesting
- Resource management
Studies have shown that the use of rail-based robotic arms in agriculture can significantly improve work efficiency, reduce production costs, and effectively mitigate environmental impact. By using robots in agricultural processes, it is possible to reduce contamination, lower the risk of crop damage, and make agriculture more sustainable. Additionally, it can increase accuracy in operations on limited spaces or farms with diverse crops.


Objective
To develop technology for Thailand's agricultural industry and to upgrade agricultural work systems for greater efficiency.
- To develop technology for the agricultural industry of Thailand.
- To upgrade work systems in the agricultural sector to be more efficient.