




เจ้าของนวัตกรรม
นาย รวีโรจน์ แสงสิทธิ์
นักศึกษา
Details
ระบบนี้ใช้ Deep Learning และ YOLOv8 ร่วมกับการสอบเทียบกล้องและ Triangulation เพื่อตรวจจับและระบุตำแหน่ง 3 มิติของผลมะม่วงจากภาพถ่าย 2 มิติ ช่วยในการประเมินผลผลิตและตรวจสอบย้อนกลับที่มาของผลผลิตได้อย่างแม่นยำ
การประเมินผลผลิตของผลมะม่วง และพฤติกรรมของผู้บริโภคที่มีความตระหนักถึงที่มาของผลผลิตมากยิ่งขึ้น ต้องการตรวจสอบย้อนกลับถึงที่มาของผลผลิตว่าผลผลิตนั้นๆได้รับการดูแลมาอย่างไรผ่านการระบุตำแหน่งของผลนั้นๆ ความเกี่ยวเนื่องกันถึงลักษะของผลผลิตที่เป็นผลมาจากวิธีการดูแลผลหรือต้นของผลผลิตในขณะที่ยังไม่ถูกเก็บเกี่ยว
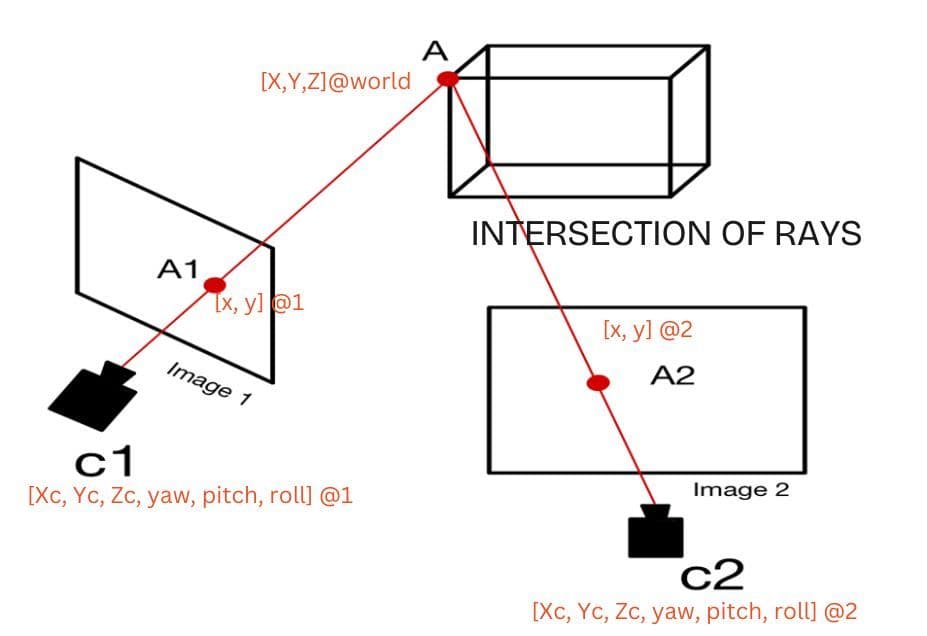
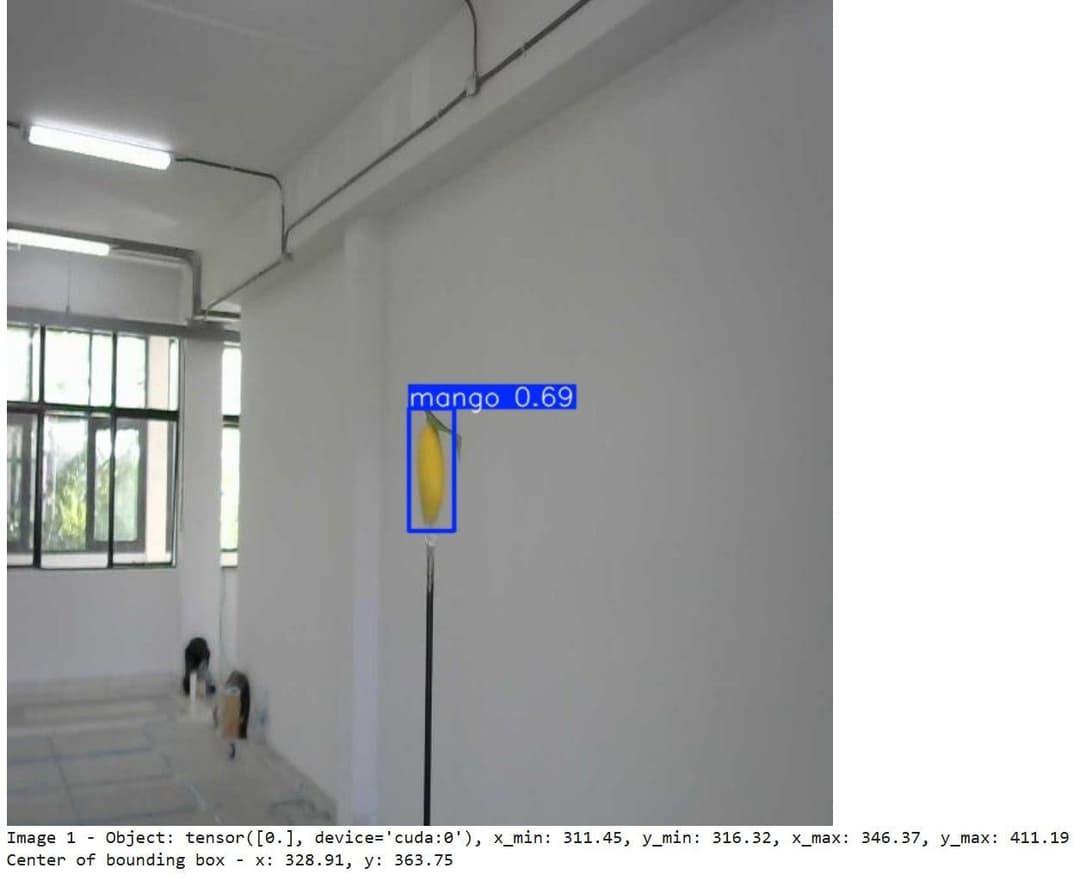
ดังนั้นเพื่อสร้างแบบจำลองที่สามารถตรวจจับและระบุตำแหน่งของผลมะม่วง โดยใช้ภาพถ่าย 2 มิติ ด้วยวิธีการ Deep Learning Model และเพื่อศึกษาเทคนิคการระบุพิกัดของผลมะม่วงในโลกจริงจากภาพภาพ 2 มิติ มีการใช้โมเดล YOLOv8 เพื่อ Object detection ร่วมกับเทคนิคการสอบเทียบกล้อง (Camera Calibration) และ Triangulation เพื่อหาตำแหน่ง 3 มิติ ของผลมะม่วงในภาพที่ถูกตรวจจับได้
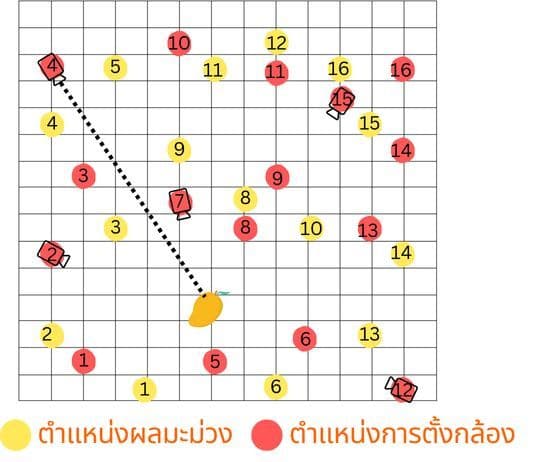
จากการทำการทดลองหาตำแหน่งทั้งหมด 125 ครั้ง ที่มีการสุ่มค่าตำแหน่งของผลมะม่วง และตำแหน่งของกล้องที่มีมุม Yaw และ Pitch ที่แตกต่างกัน โดยการใช้ค่า Parameter จากรูปที่ถ่ายถัดไปมาเปรียบเทียบกันเพื่อหาตำแหน่งจริง 3 มิติ ที่ได้ผลความถูกต้องที่:
- Precision: 0.928
- Recall: 0.901
- mAP50: 0.965
- mAP50-95: 0.785
- F1-Score: 0.914
ซึ่งมีความแม่นยำที่มากพอเพื่อทำนายตำแหน่งของผลมะม่วงที่มีความคลาดเคลื่อนประมาณ 38 เซนติเมตร

Objective
เพื่อสร้างแบบจำลองตรวจจับและระบุตำแหน่งผลมะม่วงด้วย Deep Learning และศึกษาเทคนิคการระบุพิกัด 3 มิติจากภาพ 2 มิติ
- เพื่อสร้างแบบจำลองที่สามารถตรวจจับและระบุตำแหน่งของผลมะม่วง โดยใช้ภาพถ่าย 2 มิติ ด้วยวิธีการ Deep Learning Model
- เพื่อศึกษาเทคนิคการระบุพิกัดของผลมะม่วงในโลกจริงจากภาพภาพ 2 มิติ