




Innovation Owner
Mr. RAWEEROJ SANGSIT
Student
Details
This system utilizes Deep Learning and YOLOv8, combined with camera calibration and triangulation, to detect and localize mangoes in 3D from 2D images. It supports yield evaluation and traceability by providing accurate positional data.
The evaluation of mango yield and consumer behavior reflects an increasing awareness of product origins, with a growing demand for traceability to understand how the produce has been cultivated and managed. This study explores the relationship between mango characteristics and cultivation practices before harvest, using location identification to provide insights into these processes.
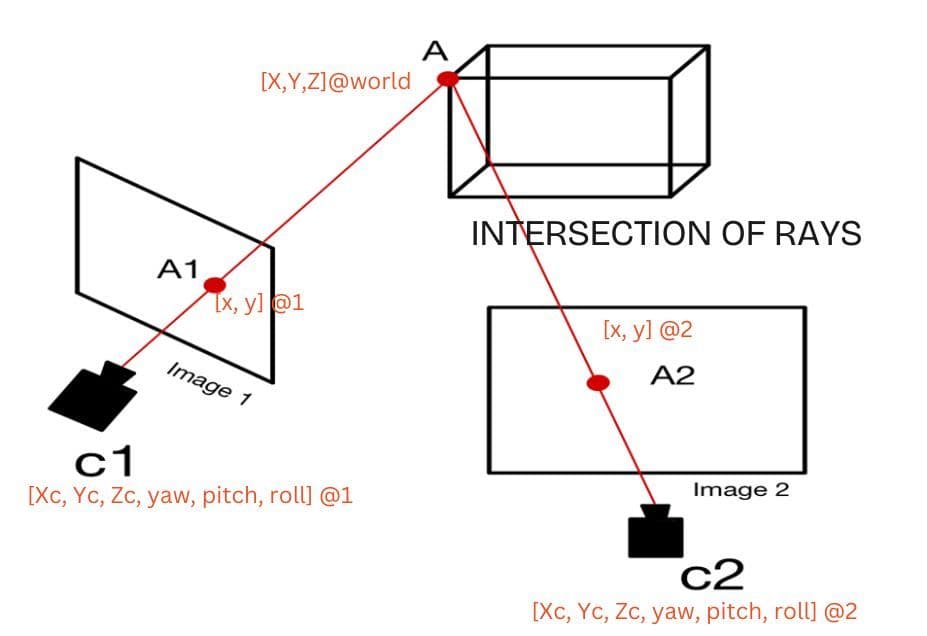
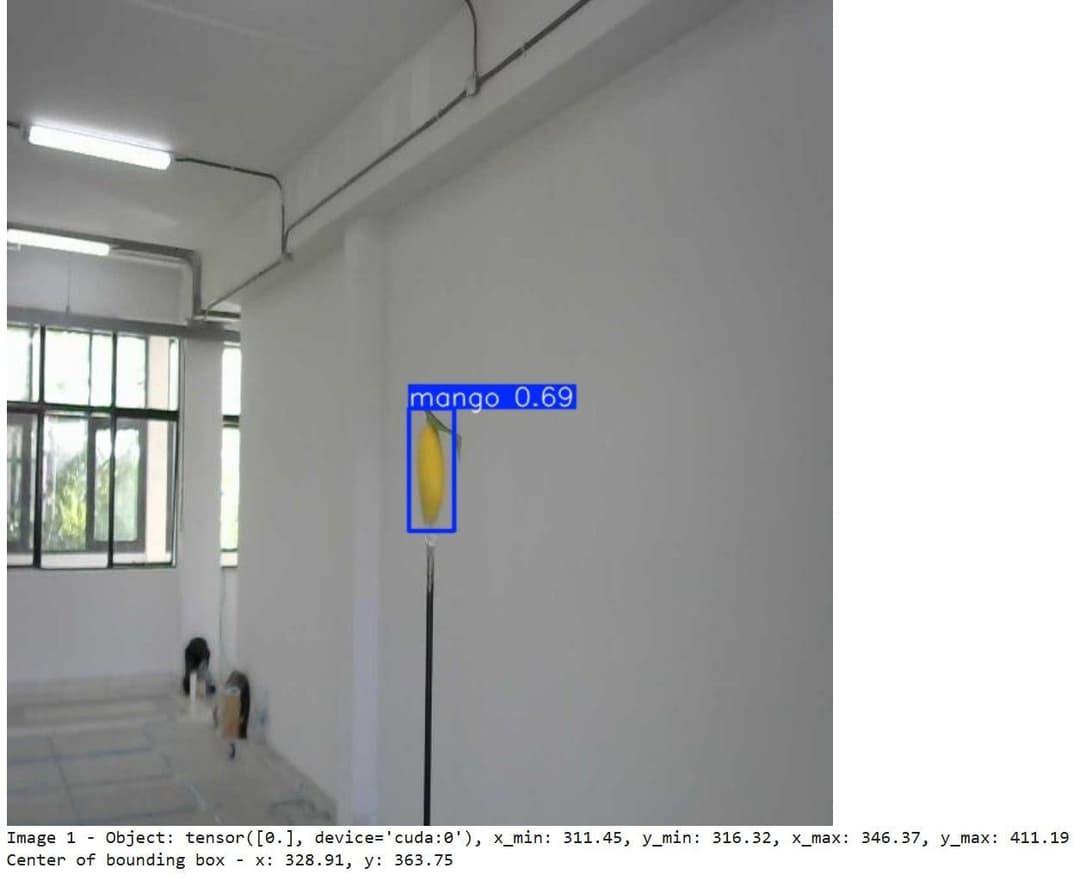
To achieve this, a model was developed to detect and locate mangoes using 2D images via a Deep Learning approach. The study also investigates techniques to determine the real-world coordinates of mangoes from 2D images. The YOLOv8 model was employed for object detection, integrated with camera calibration and triangulation techniques to estimate the 3D positions of detected mangoes.
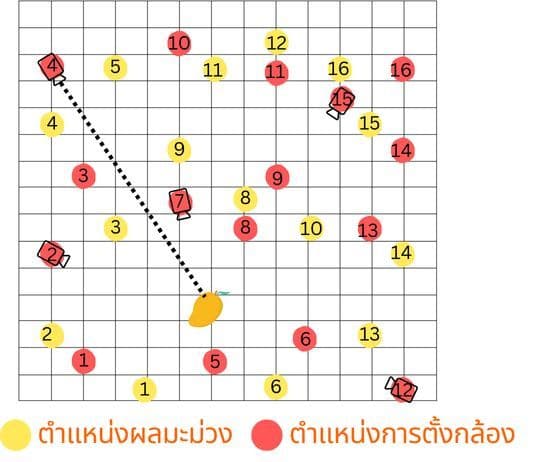
Experiments involved 125 trials with randomized mango positions and camera placements at varying yaw and pitch angles. Parameters extracted from sequential images were compared to derive the actual 3D positions of the mangoes. The YOLOv8 model demonstrated high performance with prediction metrics:
- Precision: 0.928
- Recall: 0.901
- mAP50: 0.965
- mAP50-95: 0.785
- F1-Score: 0.914
These results indicate sufficient accuracy for predicting mango positions, with an average positional error of approximately 38 centimeters.

Objective
To develop a model for detecting and locating mangoes using 2D images via Deep Learning and to investigate techniques for determining real-world 3D coordinates from 2D imagery.
- To develop a model capable of detecting and locating mangoes using 2D images through a Deep Learning approach.
- To investigate techniques for determining the real-world coordinates of mangoes from 2D images.