




เจ้าของนวัตกรรม
นาย กำชัย ยศสาย
นักศึกษา
Details
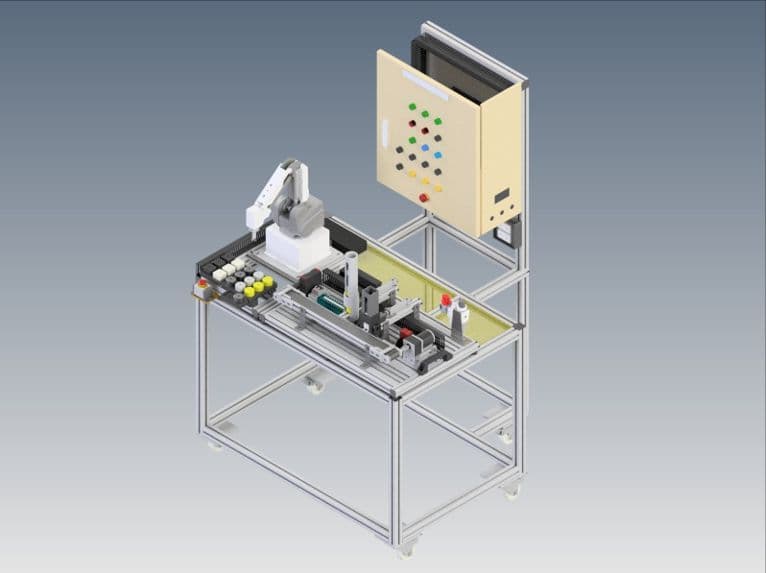
โครงการนี้มุ่งเน้นการพัฒนาห้องปฏิบัติการนิวเมติกส์และระบบควบคุมแขนกลอุตสาหกรรม เพื่อเสริมสร้างทักษะที่จำเป็นในอุตสาหกรรมการผลิต โดยบูรณาการเทคโนโลยี PLC และ AI Vision เพื่อเพิ่มขีดความสามารถในการแข่งขันของนักศึกษาและสนับสนุนนวัตกรรมในอนาคต
โครงการนี้จัดทำขึ้นเพื่อตอบสนองความต้องการในการพัฒนาทักษะและองค์ความรู้ด้านระบบนิวเมติกส์และการควบคุมอัตโนมัติ ซึ่งเป็นหัวใจสำคัญในอุตสาหกรรมการผลิตในปัจจุบัน โดยระบบนิวเมติกส์มีบทบาทสำคัญในกระบวนการผลิตหลายประเภท เช่น การควบคุมเครื่องจักร อุปกรณ์อัตโนมัติ และระบบสายการผลิต
เนื่องจากภาควิชาวิศวกรรมวัดคุมขาดห้องปฏิบัติการที่รองรับการศึกษาและทดลองเกี่ยวกับระบบนิวเมติกส์ คณะผู้จัดทำจึงมุ่งเน้นการฟื้นฟูและพัฒนาห้องปฏิบัติการให้สามารถตอบโจทย์การเรียนการสอนและการวิจัย โดยมีรายละเอียดดังนี้:
- ศึกษาและพัฒนาระบบควบคุมแขนกลอุตสาหกรรมและระบบนิวเมติกส์
- บูรณาการเทคโนโลยีสมัยใหม่ เช่น PLC (Programmable Logic Controller) และ AI Vision
- พัฒนาห้องปฏิบัติการให้เป็นแหล่งเรียนรู้ที่สำคัญสำหรับนักศึกษา
- เพิ่มขีดความสามารถในการแข่งขันของนักศึกษาในตลาดแรงงานและสนับสนุนนวัตกรรมในอุตสาหกรรมการผลิต
Objective
วัตถุประสงค์หลักของโครงการคือการศึกษาระบบควบคุมแขนกลอุตสาหกรรมและนิวเมติกส์ รวมถึงการประยุกต์ใช้งานร่วมกับ PLC, Dobot และเทคโนโลยี AI Vision
- เพื่อศึกษาระบบควบคุมแขนกลอุตสาหกรรมและนิวเมติกส์
- เพื่อศึกษาการทำงานร่วมกันของ PLC และ Dobot
- เพื่อศึกษาการประยุกต์การใช้งานร่วมกับ AI Vision