




เจ้าของนวัตกรรม
นาย สลิล หัตถการุณย์
นักศึกษา
Details
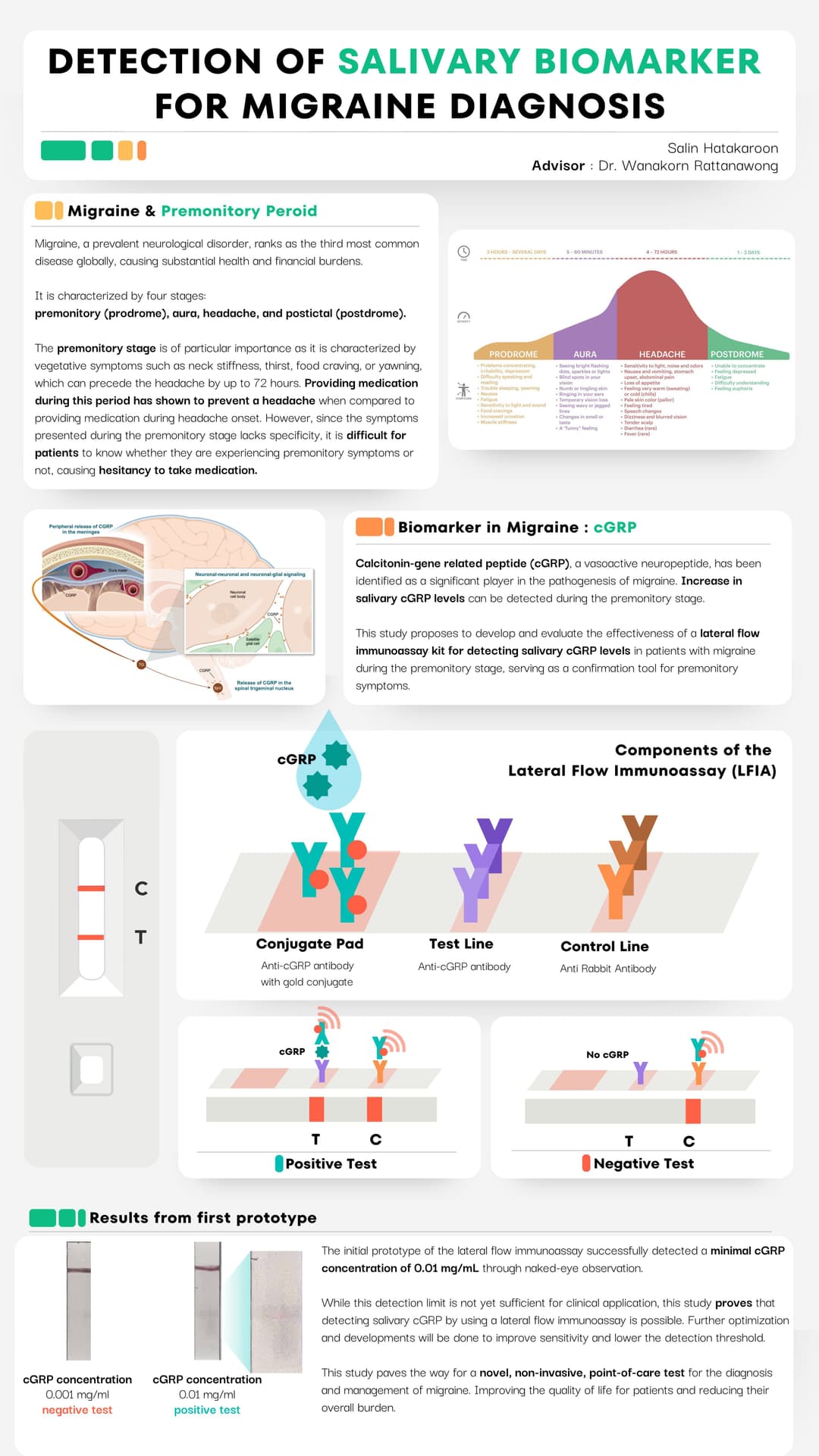
โรคปวดศีรษะไมเกรนส่งผลกระทบต่อการใช้ชีวิตอย่างมาก การศึกษานี้จึงมุ่งพัฒนาชุดทดสอบ Lateral Flow Immunoassay เพื่อตรวจวัดระดับโปรตีน cGRP ในน้ำลาย ซึ่งเป็นตัวบ่งชี้สำคัญในช่วงระยะอาการเตือน เพื่อช่วยให้ผู้ป่วยสามารถรับยาป้องกันอาการปวดศีรษะได้ทันท่วงที
โรคปวดศีรษะไมเกรนเป็นโรคที่พบได้บ่อยและส่งผลต่อการทำงานและการดำเนินชีวิตประจำวันของผู้ป่วยอย่างมาก โดยแบ่งออกเป็น 4 ระยะ ได้แก่:
- ระยะอาการเตือน (Prodrome)
- ระยะออร่า (Aura)
- ระยะปวดศีรษะ (Headache)
- ระยะฟื้นตัว (Postdrome)
ระยะอาการเตือนมีความสำคัญอย่างยิ่งเนื่องจากสามารถเกิดขึ้นก่อนการปวดศีรษะได้นานถึง 72 ชั่วโมง และการใช้ยาในช่วงนี้สามารถช่วยป้องกันอาการปวดได้ อย่างไรก็ตาม อาการมักไม่จำเพาะเจาะจงทำให้ผู้ป่วยสังเกตได้ยาก
โปรตีน Calcitonin gene-related peptide (cGRP) เป็นโมเลกุลสำคัญที่มีบทบาทในการเกิดไมเกรน โดยพบว่าระดับ cGRP ในน้ำลายจะเพิ่มขึ้นในช่วงระยะอาการเตือน การศึกษานี้จึงมุ่งพัฒนาชุดทดสอบแบบ Lateral Flow Immunoassay เพื่อตรวจหาระดับ cGRP ในน้ำลาย ซึ่งจะเป็นเครื่องมือช่วยยืนยันอาการเพื่อให้ผู้ป่วยมั่นใจและใช้ยาได้ก่อนเริ่มมีอาการปวดหัว
Objective
เพื่อพัฒนาและประเมินประสิทธิภาพของชุดทดสอบ Lateral Flow Immunoassay สำหรับตรวจวัดระดับโปรตีน cGRP ในน้ำลายของผู้ป่วยไมเกรนในช่วงระยะอาการเตือน เพื่อใช้เป็นเครื่องมือยืนยันอาการก่อนเกิดอาการปวดศีรษะ
การศึกษานี้มีวัตถุประสงค์เพื่อพัฒนาและประเมินประสิทธิภาพของชุดทดสอบแบบ Lateral Flow Immunoassay สำหรับตรวจวัดระดับโปรตีน cGRP ในน้ำลายของผู้ป่วยไมเกรนในช่วงระยะอาการเตือน (premonitory stage) เพื่อใช้เป็นเครื่องมือยืนยันอาการก่อนเกิดอาการปวดศีรษะ