




Innovation Owner
นาง Patcharin Kamsing
Advisor
Details
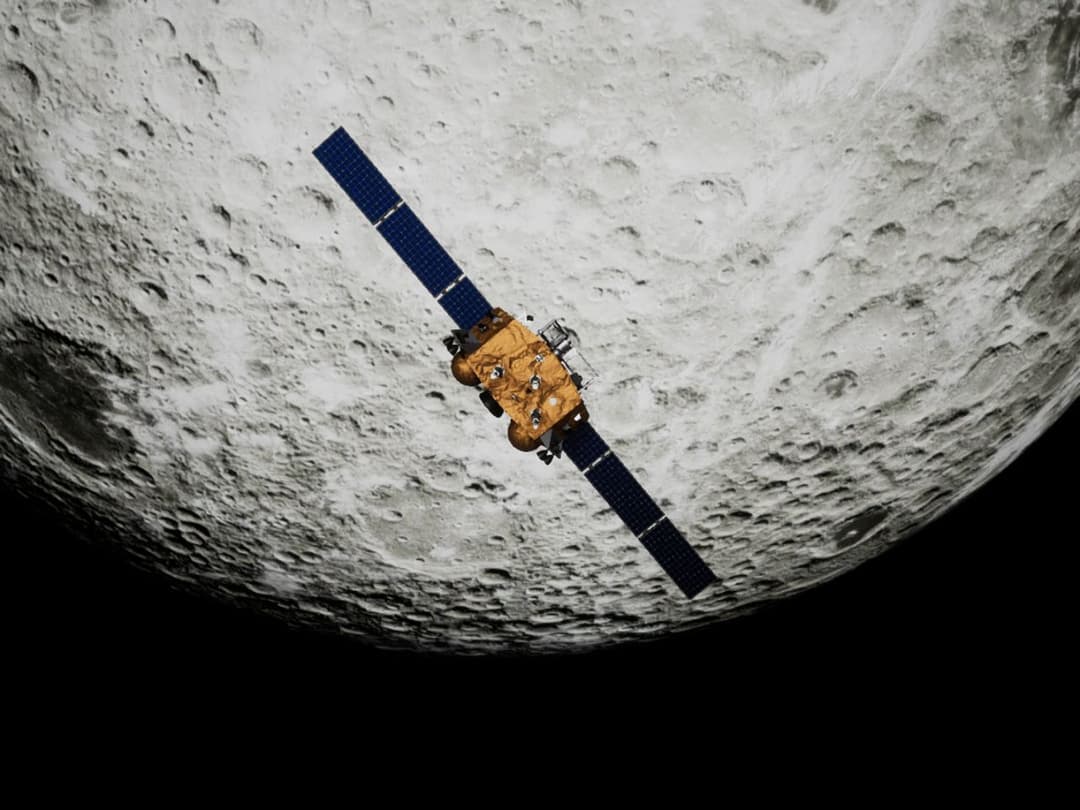
This research constructs a vision-based pose estimation model using deep convolutional neural networks to support on-orbit docking operations. The model achieves high accuracy in position and attitude estimation for spacecraft, facilitating future autonomous docking missions.
The capture of a target spacecraft by a chaser is an on-orbit docking operation that requires an accurate, reliable, and robust object recognition algorithm. This research constructs a vision-based pose estimation model that performs image processing via a deep convolutional neural network.
- Methodology: The model repurposes a modified pretrained GoogLeNet with an Unreal Engine 4 rendered dataset of the Soyuz spacecraft, learning correlations between images and six degrees-of-freedom parameters.
- Performance: Using a weighted Euclidean-based loss function, the model achieved a position accuracy of 92.53% (1.2 m error) and an attitude prediction accuracy of 87.93% (Euler angle errors not exceeding 7.6 degrees).
- Impact: This research contributes to spacecraft detection and tracking, providing a foundation for addressing actual docking operations in the future.


Objective
To apply deep convolutional neural networks for the pose estimation of non-cooperative spacecraft during close-proximity and docking operations.
Apply deep convolutional neural network for non-cooperative spacecrafts pose estimation for close-proximity and docking operation.