




Innovation Owner
Mr. PHAKKAWAT ANGSRISURAPORN
Student
Details
This research presents a CFD-assisted expert system (ES) for the controlled atmosphere process (CAP) in organic rice silos. By using nitrogen fumigation to reduce O2 concentration below 2%, the system effectively eliminates insects while maintaining storage standards.
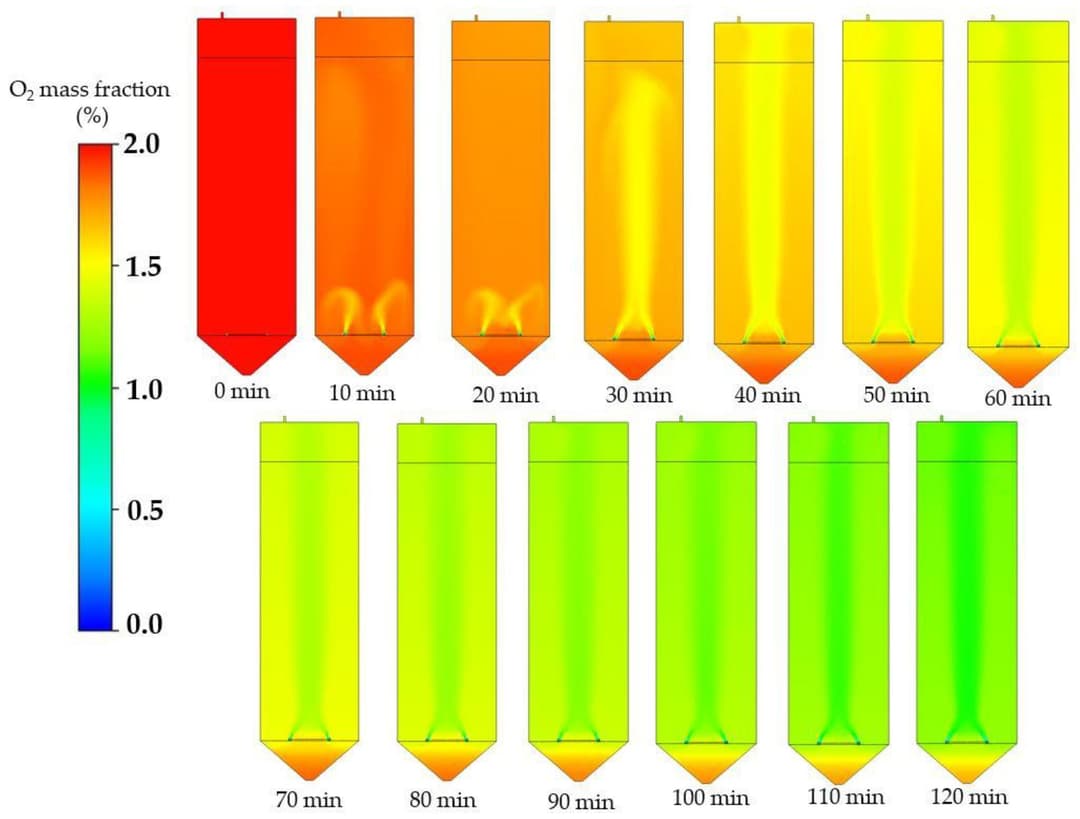
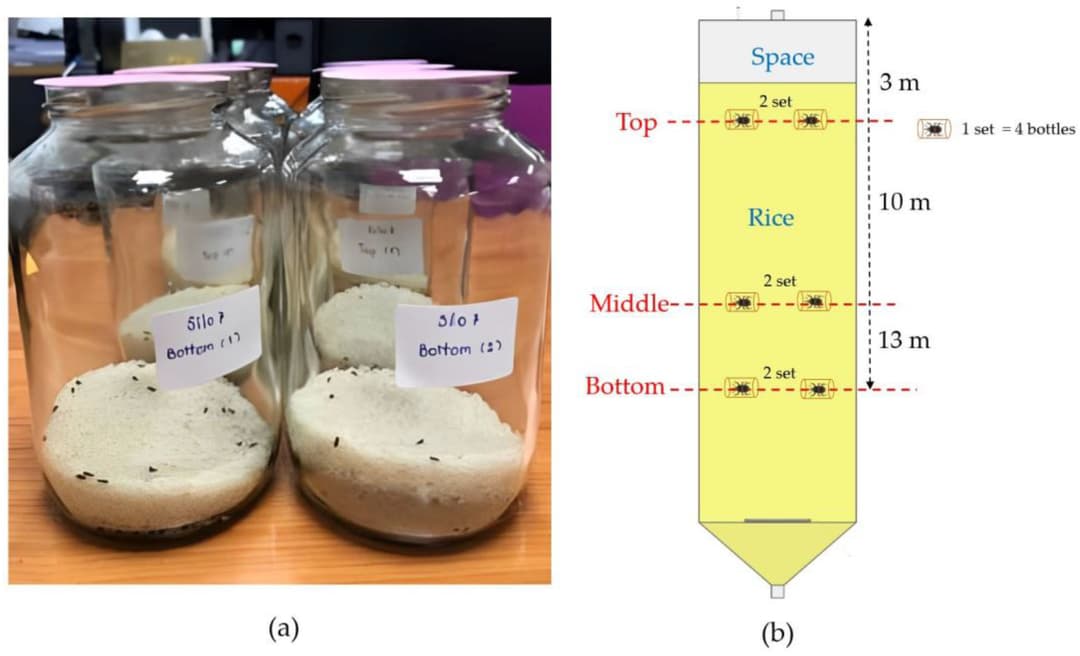
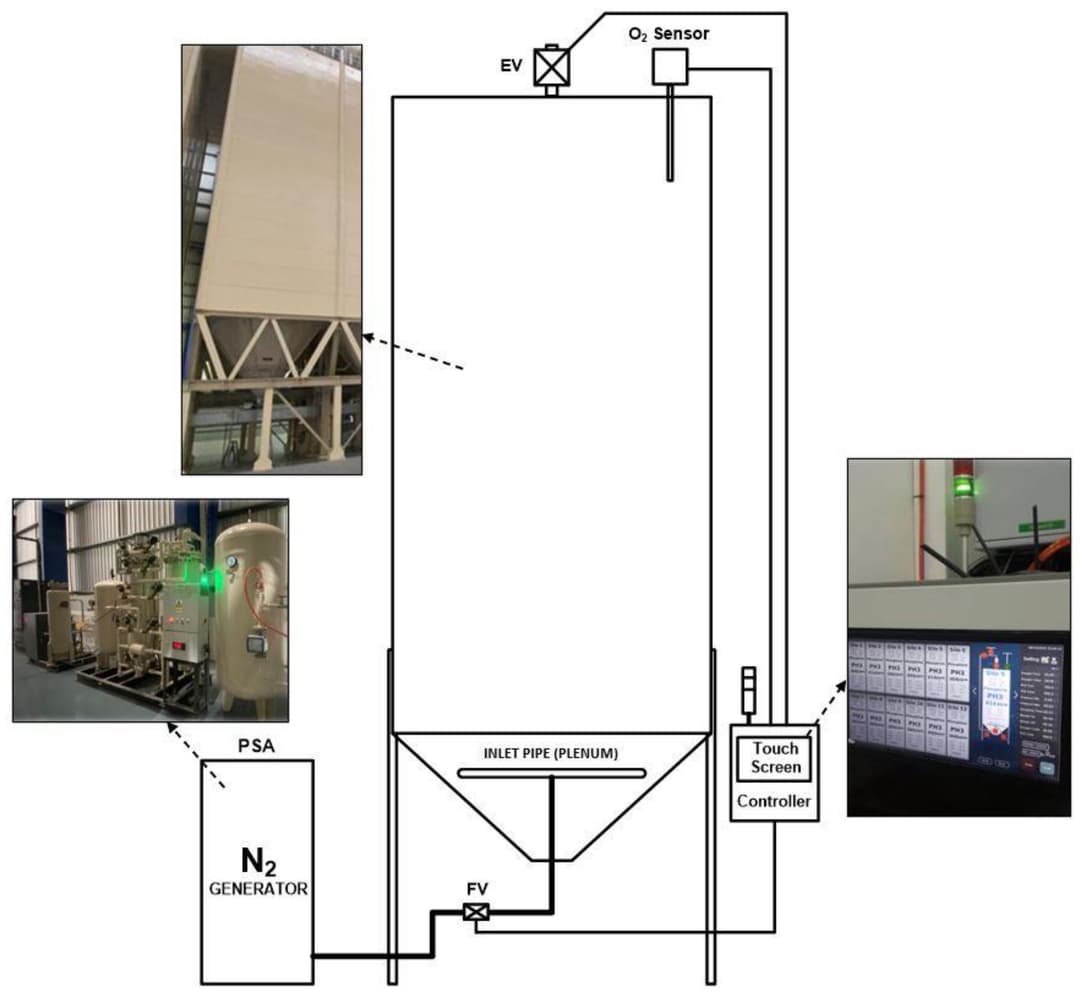
Since organic rice storage silos were faced with an insect problem, an owner solved this problem using the expert system (ES) in the controlled atmosphere process (CAP) under the required standard, fumigating insects with an N2, reducing O2 concentration to less than 2% for 21 days. This article presents the computational fluid dynamics (CFD) assisted ES successfully solved this problem.
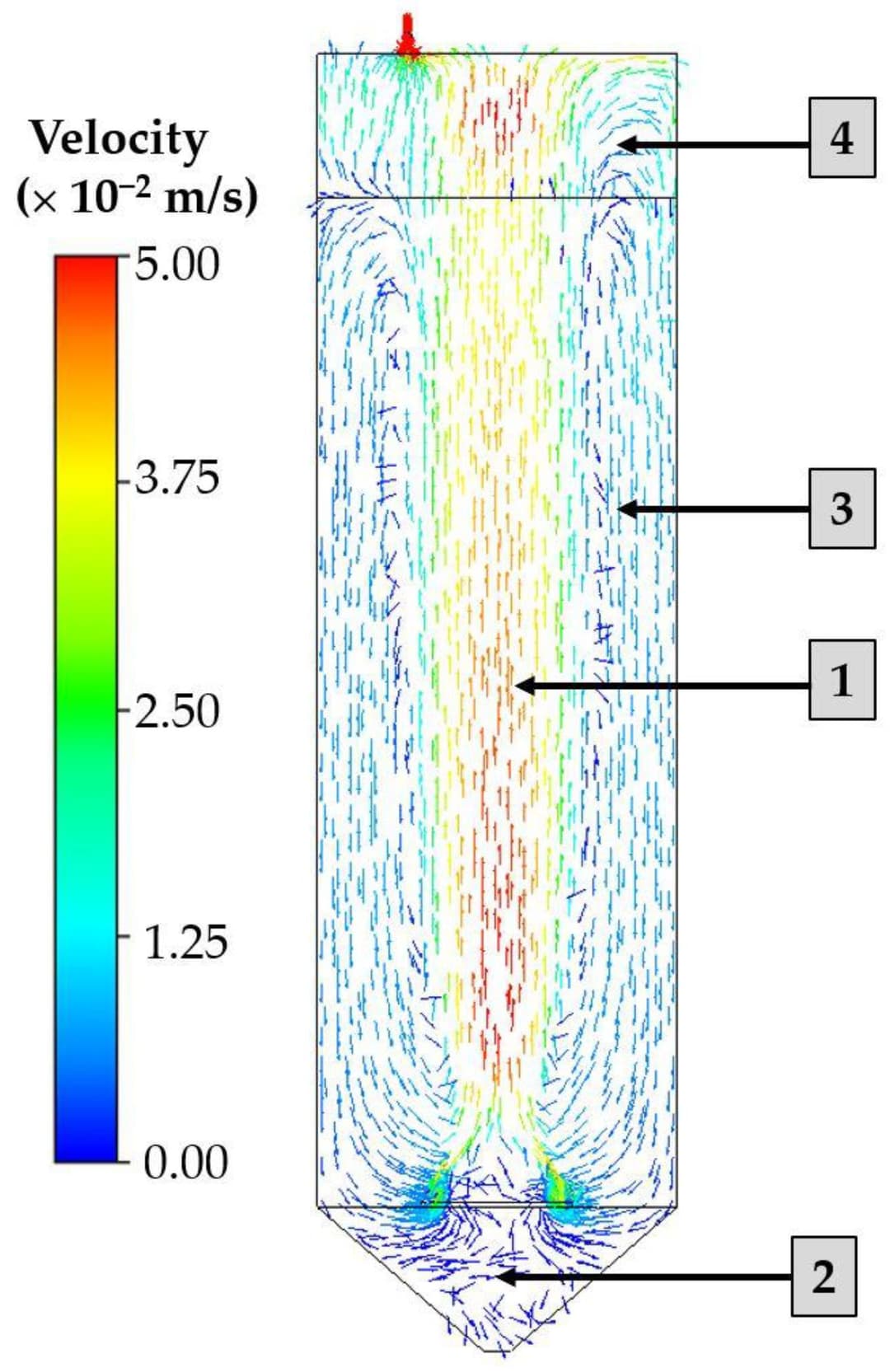
- CFD Analysis: Employed to determine the gas flow pattern, O2 concentration, proper operating conditions, and a correction factor (K) of silos. Results were consistent with experimental data and theory.
- System Development: The ES was developed based on the inference engine assisted by CFD results and the sweep-through purging principle.
- Efficacy: Experimental results and owner feedback confirmed the excellent efficacy of ES implementation. The novel aspect of this research is a CFD methodology to create the inference engine and the ES.
Objective
The objectives include developing an ES-CAP system using CFD to optimize nitrogen fumigation, ensuring O2 levels remain below 2% for effective insect control, and promoting sustainable, chemical-free rice storage.
- Develop and apply an Expert System (ES) in the Controlled Atmosphere Process (CAP) to solve insect infestation problems in organic rice silos under required standards.
- Utilize Computational Fluid Dynamics (CFD) to analyze gas flow patterns, oxygen (O₂) concentration, and optimal conditions for nitrogen (N₂) fumigation processes.
- Develop an Inference Engine for the ES based on CFD simulation results and the Sweep-Through Purging principle, evaluating CAP efficacy in real environments by ensuring O₂ concentration remains below 2%.
- Promote efficient and sustainable rice storage by reducing the use of chemical fumigants, aligning with the Sustainable Development Goals (SDGs).