




Innovation Owner
supakorn suwan
Advisor
Details
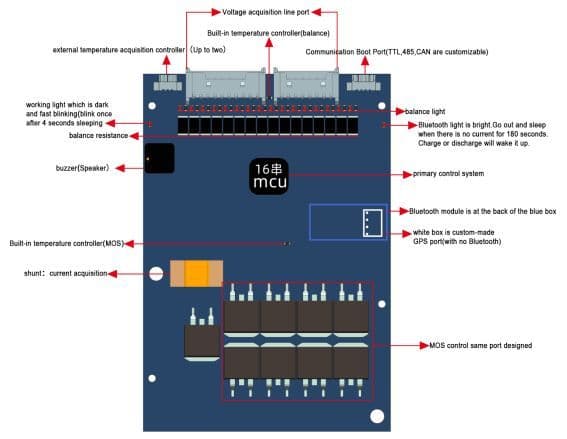
This research focuses on designing a remote battery management system that allows for monitoring, control, and customization of battery cell properties, specifically for graphene cells in residential energy systems.
Design and Development of a Remote Battery Management System
This research focuses on the design and development of a battery management system that enables remote monitoring and control, allowing users to customize battery cell properties as needed. The system is specifically designed for use with graphene battery cells and can be effectively applied to alternative energy systems for residential use.
Objective
The project aims to develop a remote-controlled battery management system that supports customizable cell properties, graphene battery integration, and residential alternative energy applications.
- Design and develop a battery management system capable of remote control and monitoring.
- Enable the system to customize battery cell properties according to user requirements.
- Test and apply the system with newly designed and developed graphene battery cells.
- Integrate the system with residential alternative energy solutions to enhance energy efficiency and sustainability.