




Innovation Owner
นางสาว Mettaya Kitiwan
Advisor
Details
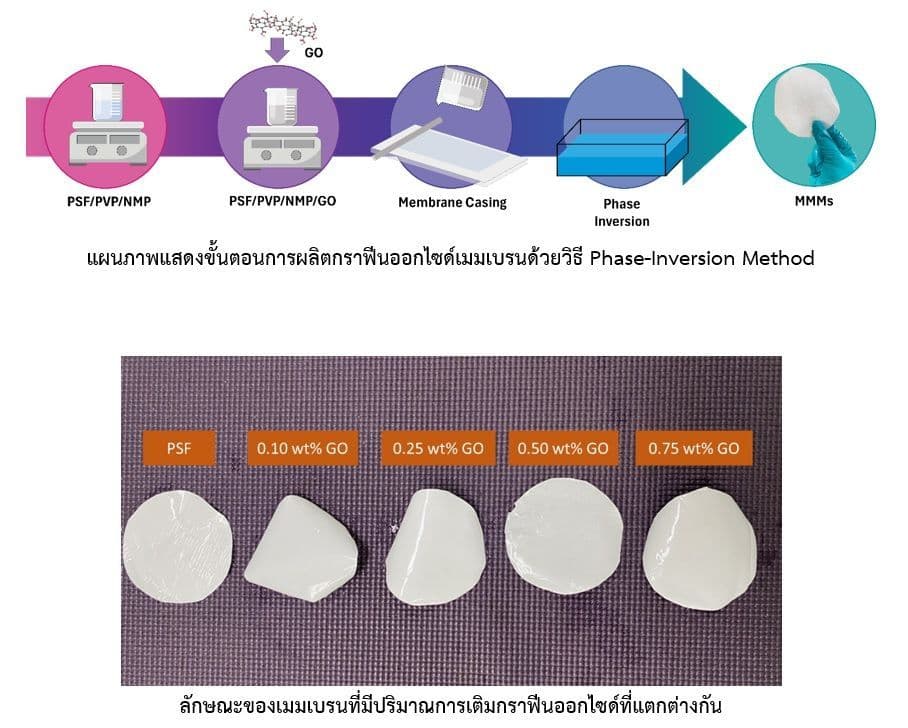
This research focuses on the fabrication of graphene oxide (GO) composite membranes using the Phase-Inversion Method. These membranes offer high water permeability, chemical stability, and efficient removal of pollutants for industrial and environmental applications.
This research focuses on the fabrication of graphene oxide (GO) composite membranes using the Phase-Inversion Method, which transforms polymers from liquid to solid through phase separation. This process creates a porous membrane structure, making it highly adaptable, cost-effective, and suitable for wastewater treatment, separation processes, and industrial filtration applications.
Graphene oxide, with its nano-layered structure, offers excellent molecular sieving properties, high water permeability, and chemical and mechanical stability, making it an ideal additive for membrane fabrication. The GO-based membrane demonstrates efficient removal of:
- Nanoparticles and heavy metal ions (Pb²⁺, Cr⁶⁺, Hg²⁺)
- Organic pollutants and microorganisms
- Pharmaceutical contaminants (antibiotics and hormones)
It also exhibits antifouling properties and high hydrophilicity due to oxygen-functional groups. Applications include industrial wastewater treatment, desalination, and water purification, providing a sustainable and energy-efficient solution.
Objective
The objective is to develop a graphene oxide composite membrane using the Phase-Inversion Method to enhance filtration efficiency, water permeability, and durability for sustainable wastewater treatment and desalination.
The objective of this project is to develop a graphene oxide composite membrane using the Phase-Inversion Method to enhance the efficiency of filtration and waste removal in water sources, such as heavy metals, organic substances, and microorganisms. The project aims to improve water permeability, durability, and antifouling properties for effective and sustainable applications in industrial wastewater treatment, desalination, and the removal of biological and pharmaceutical contaminants.