




Innovation Owner
Mr. PEERAWAT LAOKAWONG
Student
Details
This project focuses on designing a manual control system for industrial robots using Load Cell technology. By integrating sensors with an Arduino and MATLAB, the system enables precise, real-time control that reduces setup time and enhances human-robot interaction.
This research project focuses on the design and development of a Manual Control Robot using Load Cell technology to enhance precision and reduce the time required for robot control. The use of automation robots in industries still presents challenges due to the complexity of programming and control. Therefore, developing a manual control system that responds to force input in all directions can significantly improve the efficiency of robots, making them more suitable for tasks requiring precise and intricate control.
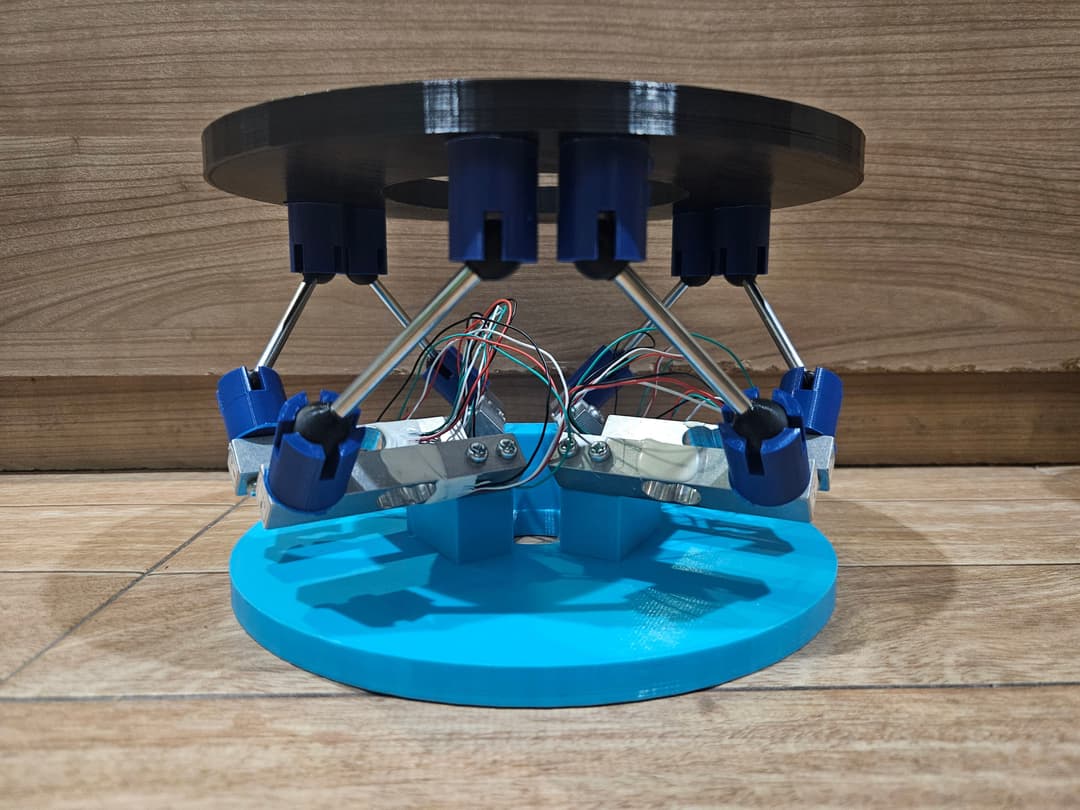
The study integrates Load Cell sensors, an HX711 amplifier circuit, and an Arduino UNO R3 to develop a control module that translates user-applied forces into commands for an RV-7FRL-D industrial robotic arm. Additionally, MATLAB is utilized for processing Load Cell data to analyze and optimize the robot’s movement accuracy.
The results demonstrate that the developed system effectively reduces robot setup time while simplifying and improving control flexibility. This project represents a crucial step in enhancing the capabilities of industrial robots, allowing for seamless human-robot interaction through a manual control system that directly responds to user-applied forces.
Objective
The objectives include designing a multi-directional force-responsive manual control system, developing MATLAB-based analysis for Load Cell data, and improving overall robot control efficiency and precision for industrial environments.
- To design a Manual Control Robot capable of receiving pressure and tension forces in all directions.
- To develop code for reading force values from Load Cells via MATLAB and analyze them for integration with the Manual Control Robot.
- To increase convenience and reduce the time required for controlling robot movement.
- To improve the control system to respond with high precision, suitable for industrial environment applications.