




เจ้าของนวัตกรรม
นาย พีรวัฒน์ เลากาวงศ์
นักศึกษา
Details
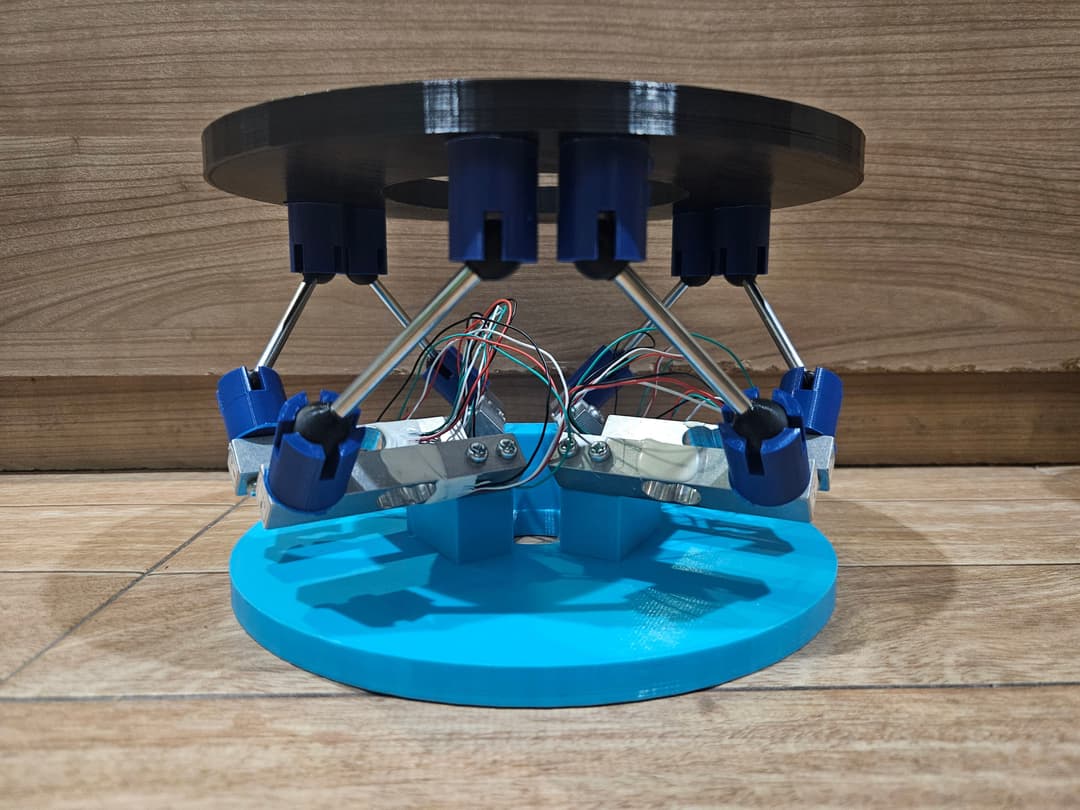
โครงงานนี้มุ่งเน้นการออกแบบและพัฒนา Manual Control Robot โดยใช้ Load Cell เพื่อเพิ่มความแม่นยำและลดระยะเวลาในการควบคุมหุ่นยนต์แขนกลอุตสาหกรรม RV-7FRL-D ให้สามารถตอบสนองต่อแรงกดและแรงดึงในทุกทิศทางได้อย่างมีประสิทธิภาพ
โครงงานวิจัยนี้มุ่งเน้นการออกแบบและพัฒนา Manual Control Robot โดยใช้ Load Cell เพื่อเพิ่มความแม่นยำและลดระยะเวลาในการควบคุมหุ่นยนต์ การใช้หุ่นยนต์อัตโนมัติในอุตสาหกรรมยังคงมีข้อจำกัดด้านความซับซ้อนของการตั้งโปรแกรมและการควบคุม ดังนั้น การพัฒนาระบบ Manual Control ที่สามารถตอบสนองต่อแรงกดและแรงดึงในทุกทิศทางจึงเป็นแนวทางที่ช่วยเพิ่มประสิทธิภาพของหุ่นยนต์ให้เหมาะสมกับงานที่ต้องการการควบคุมที่ละเอียดอ่อนและซับซ้อน
งานวิจัยนี้ใช้ Load Cell ร่วมกับวงจรขยายสัญญาณ HX711 และ Arduino UNO R3 เพื่อพัฒนาโมดูลควบคุมที่สามารถรับค่าแรงจากผู้ใช้และแปลงเป็นคำสั่งสำหรับหุ่นยนต์ RV-7FRL-D ซึ่งเป็นหุ่นยนต์แขนกลในอุตสาหกรรม นอกจากนี้ยังมีการใช้ MATLAB ในการประมวลผลข้อมูลจาก Load Cell เพื่อวิเคราะห์และกำหนดการเคลื่อนที่ของหุ่นยนต์ให้แม่นยำยิ่งขึ้น
ผลการศึกษาพบว่าระบบที่พัฒนาขึ้นสามารถช่วยลดเวลาการตั้งค่าหุ่นยนต์ และทำให้กระบวนการควบคุมมีความง่ายดายและยืดหยุ่นมากขึ้น โครงการนี้จึงเป็นก้าวสำคัญในการเพิ่มศักยภาพของหุ่นยนต์อุตสาหกรรมให้สามารถทำงานร่วมกับมนุษย์ได้อย่างมีประสิทธิภาพ โดยอาศัยการควบคุมแบบแมนนวลผ่าน Load Cell ที่ตอบสนองต่อแรงของผู้ใช้งานได้โดยตรง
Objective
วัตถุประสงค์หลักคือการออกแบบระบบควบคุมหุ่นยนต์แบบแมนนวลที่ตอบสนองต่อแรงกดและแรงดึงได้ทุกทิศทาง พร้อมพัฒนาการประมวลผลผ่าน MATLAB เพื่อเพิ่มความแม่นยำและลดระยะเวลาในการควบคุมหุ่นยนต์ในสภาพแวดล้อมอุตสาหกรรม
- เพื่อออกแบบ Manual Control Robot ที่สามารถรับแรงกดและแรงดึงได้ทุกทิศทาง
- เพื่อพัฒนาโค้ดสำหรับการอ่านค่าแรงจาก Load Cell ผ่านโปรแกรม MATLAB และนำมาวิเคราะห์เพื่อปรับใช้ร่วมกับ Manual Control Robot
- เพื่อเพิ่มความสะดวกและลดระยะเวลาในการควบคุมการเคลื่อนที่ของหุ่นยนต์
- เพื่อปรับปรุงระบบการควบคุมให้สามารถตอบสนองได้อย่างแม่นยำและเหมาะสมกับการใช้งานในสภาพแวดล้อมอุตสาหกรรม