




เจ้าของนวัตกรรม
นาย จิรโชติ ปินะถา
นักศึกษา
Details
โปรเจคนี้พัฒนาต้นแบบระบบเล็งอาวุธจำลองปืนต่อต้านอากาศยาน โดยใช้กล้องออปติคอลตรวจจับวัตถุและคำนวณวิถีแบบ Real time เพื่อควบคุมเลเซอร์พอยน์เตอร์ผ่าน Raspberry Pi 4 และ OpenCV
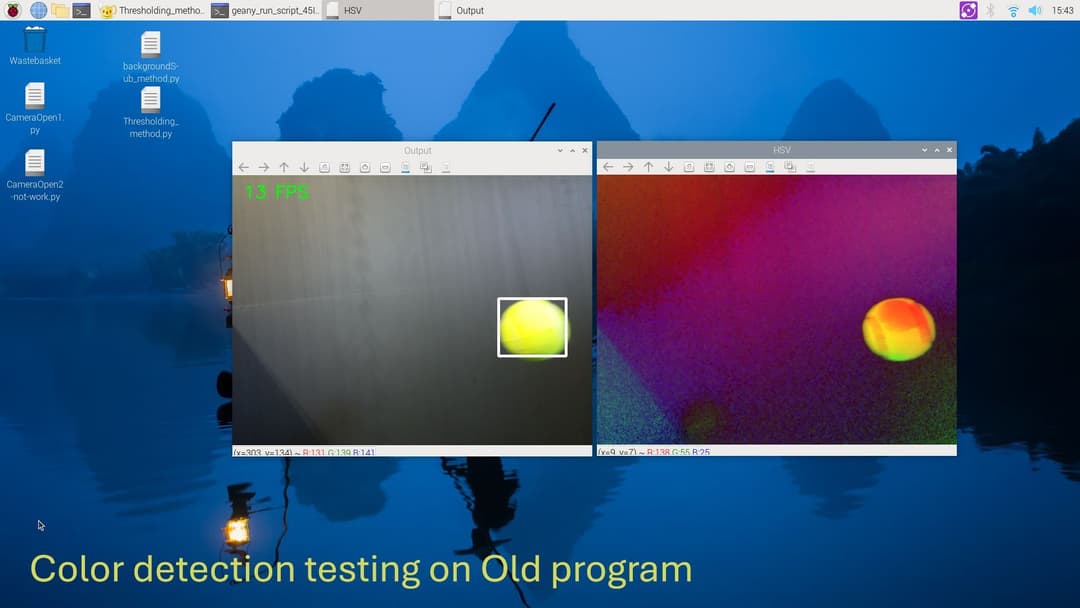
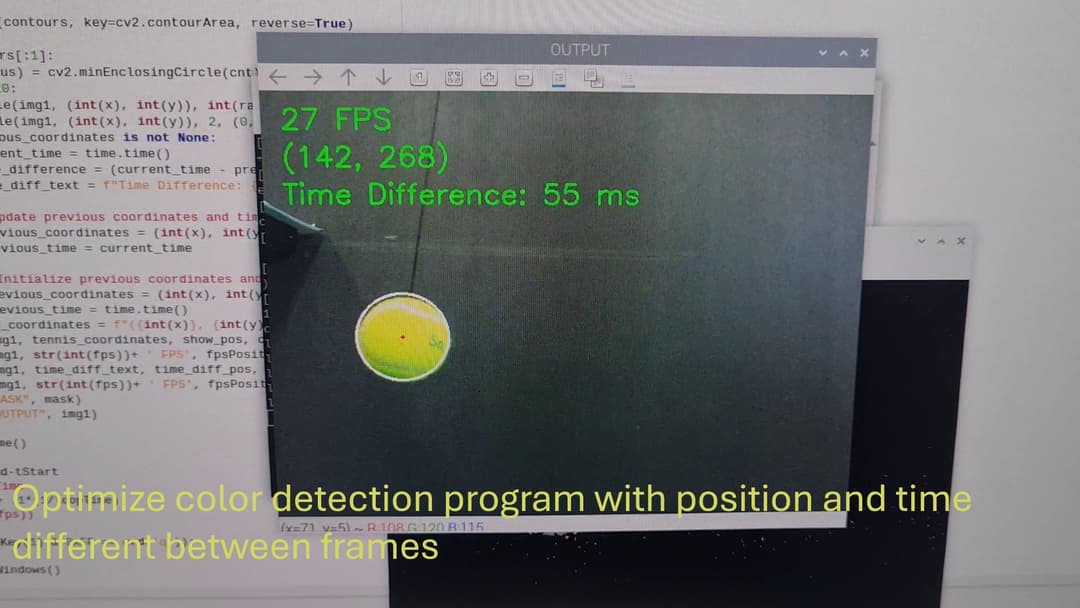
โปรเจคนี้มีเป้าหมายในการพัฒนาต้นแบบของระบบเล็งอาวุธที่จำลองเป็นปืนต่อต้านอากาศยาน โดยใช้กล้องออปติคอลเพื่อตรวจจับวัตถุที่เคลื่อนที่และคำนวณวิถีแบบ Real time ผลลัพธ์ที่ได้นั้นจะส่งไปยังเลเซอร์พอยน์เตอร์บนมอเตอร์ 2 แกนหมุน แบบ degrees of freedom(DoF) ส่งผลให้สามารถเล็งไปยังเป้าหมายที่คาดการณ์ไว้ได้ ระบบนี้ถูกสร้างขึ้นบนแพตฟอร์มของ Raspberry Pi 4 ร่วมกับซอฟแวร์ machine vision โปรแกรมการ tracking นั้นถูกพัฒนาภายใต้ไลบรารีของ OpenCV โดยอาศัย color detections algorithms
ผลการทดลองตอนนี้สามารถตรวจจับการเคลื่อนไหวของลูกเทนนิสแบบ real time ที่อัตรา 30 เฟรมต่อวินาที(fps) ขณะนี้โปรเจคอยู่นขั้นตอนการออกแบบและทดลองกับระบบแมคคานิคเพื่อควบคุมเลเซอร์พอยน์เตอร์ให้แม่นยำ โปรเจคนี้มีการนำความรู้ทางด้านอิเล็กทรอนิกส์(computer programing) และวิศวกรรมเครื่องกล(การควบคุมมอเตอร์)มาใช้งาน

Objective
ศึกษาการพัฒนาโปรแกรมประมวลผลภาพแบบเรียลไทม์ การพัฒนาระบบที่มีความแม่นยำสูง และการคำนวณเพื่อคาดคะเนจุดตกของวัตถุ
- เพื่อศึกษาการพัฒนาโปรแกรม image processing แบบ Real time
- เพื่อศึกษาการพัฒนาระบบที่ต้องมีความแม่นยำ
- เพื่อศึกษาเกี่ยวกับการคำนวนเพื่อคาดคะเนจุดตกของวัตถุ