




เจ้าของนวัตกรรม
ผศ.ดร. ชมัยพร อนุวงศ์
อาจารย์ที่ปรึกษา
Details
การทดลองนี้ศึกษาผลของความเข้มข้นธาตุไนโตรเจนและโพแทสเซียมร่วมกับระยะเวลาการให้แสงต่อการเจริญเติบโตของต้นวิโอลาในโรงงานผลิตพืช เพื่อเพิ่มคุณภาพและลดระยะเวลาการผลิต
การทดลองนี้มีวัตถุประสงค์เพื่อศึกษาระดับความเข้มข้นของธาตุไนโตรเจนและโพแทสเซียมร่วมกับจำนวนชั่วโมงในการให้แสงต่อการเจริญเติบโตของต้นวิโอลา (Viola) ภายใต้โรงงานผลิตพืช เพื่อเพิ่มคุณภาพของผลผลิต ลดระยะเวลา และเพิ่มรอบการผลิตให้เกิดขึ้นได้ตลอดทั้งปี โดยวางแผนการทดลองแบบ 3x3 Factorial in CRD มี 9 กรรมวิธี กรรมวิธีละ 3 ซ้ำๆ ละ 6 ต้น ซึ่งปัจจัยที่ใช้ศึกษามีอยู่ 2 ชนิด คือ:
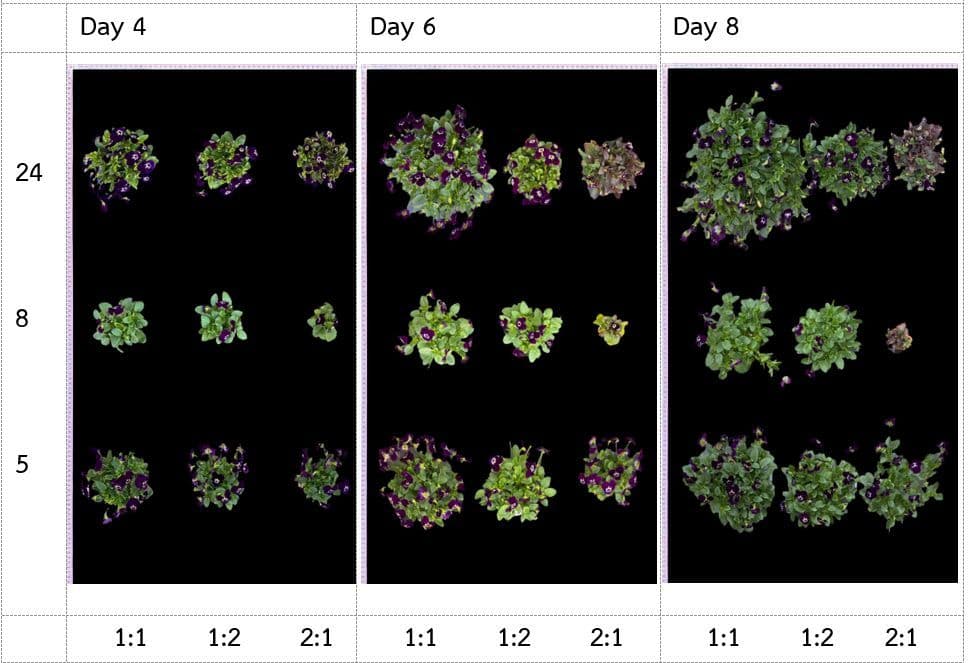
- ปัจจัยที่ 1: ความเข้มข้นของธาตุไนโตรเจน (N) ร่วมกับโพแทสเซียม (K) ในอัตราส่วน 1:1, 1:2 และ 2:1
- ปัจจัยที่ 2: จำนวนชั่วโมงในการให้แสงต่อวันที่แตกต่างกัน 3 กรรมวิธี
ผลการทดลองพบว่า การให้ระดับความเข้มข้นของปุ๋ย N:K ในอัตราส่วน 1:1 ร่วมกับแสง 24 ชั่วโมง ทำให้การเจริญเติบโตทางลำต้นและมีคุณภาพดอกมากที่สุด สามารถลดระยะเวลาในการผลิตดอกวิโอลาในแต่ละรอบจาก 90-100 วัน เหลือเพียง 43-45 วัน และเพิ่มรอบการผลิตได้ตลอดทั้งปี
Objective
เพื่อหาระดับความเข้มข้นของธาตุไนโตรเจนและโพแทสเซียมร่วมกับจำนวนชั่วโมงในการให้แสงที่เหมาะสมต่อการเจริญเติบโตและคุณภาพของต้นวิโอลาในโรงงานผลิตพืช
เพื่อหาระดับความเข้มข้นของธาตุไนโตรเจนและโพแทสเซียมร่วมกับจำนวนชั่วโมงในการให้แสงที่เหมาะสมต่อ:
- การเจริญเติบโตของต้นวิโอลา (Viola)
- คุณภาพของผลผลิต
- ระยะเวลาในการผลิตดอกวิโอลาในแต่ละรอบ
- จำนวนรอบการผลิตของต้นวิโอลาภายใต้โรงงานผลิตพืช