




เจ้าของนวัตกรรม
นาย อนาวิล ธรรมเจริญทิพย์
นักศึกษา
Details
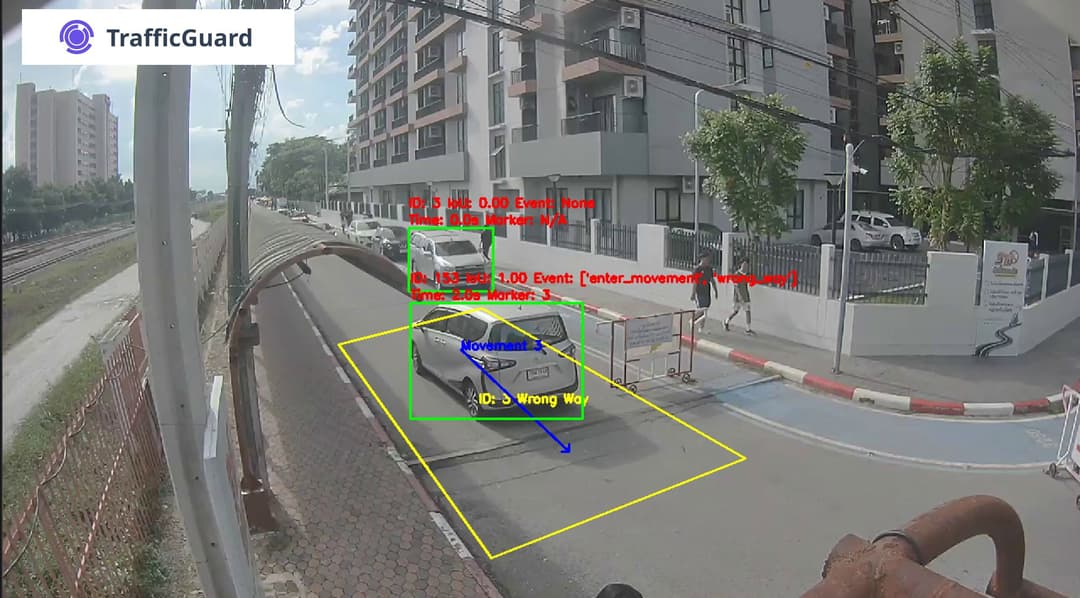
โครงงานนี้พัฒนาแพลตฟอร์มคอมพิวเตอร์วิทัศน์เพื่อวิเคราะห์ภาพจากกล้องวงจรปิดแบบเรียลไทม์ในการตรวจจับการกระทำผิดกฎจราจรโดยอัตโนมัติ ช่วยเพิ่มประสิทธิภาพการบังคับใช้กฎหมายและสนับสนุนการพัฒนาเมืองอัจฉริยะ
โครงงานนี้พัฒนาแพลตฟอร์มที่ใช้คอมพิวเตอร์วิทัศน์วิเคราะห์ภาพจากกล้องวงจรปิดแบบเรียลไทม์ เพื่อตรวจจับการกระทำผิดกฎหมายจราจร เช่น การฝ่าฝืนขับรถเข้าเขตที่มีเส้นทึบ ระบบสามารถระบุและบันทึกเหตุการณ์ละเมิดกฎจราจรโดยอัตโนมัติ ช่วยเพิ่มประสิทธิภาพการบังคับใช้กฎหมายและลดภาระของเจ้าหน้าที่ตำรวจจราจร นอกจากนี้ ยังเป็นส่วนสำคัญในการพัฒนาระบบเมืองอัจฉริยะ โดยบูรณาการข้อมูลเพื่อปรับปรุงการจัดการจราจรและความปลอดภัยบนท้องถนน
Objective
วัตถุประสงค์หลักคือการสร้างระบบวิเคราะห์ภาพจากกล้องวงจรปิดแบบเรียลไทม์เพื่อตรวจจับการกระทำผิดกฎจราจรโดยอัตโนมัติ พร้อมทั้งพัฒนาต้นแบบที่สามารถบูรณาการเข้ากับโครงสร้างพื้นฐานของเมืองอัจฉริยะได้อย่างมีประสิทธิภาพ
- เพื่อสร้างระบบที่สามารถวิเคราะห์ภาพจากกล้องวงจรปิดแบบเรียลไทม์ และระบุเหตุการณ์ที่ละเมิดกฎจราจรได้โดยอัตโนมัติ
- เพื่อพัฒนาระบบที่มีความแม่นยำในการตรวจจับและจำแนกการกระทำที่ผิดกฎจราจรประเภทต่างๆ
- เพื่อพัฒนาต้นแบบแพลตฟอร์มในการรวมระบบกล้องโทรทัศน์วงจรปิดร่วมกับการประยุกต์ใช้กับเทคโนโลยีคอมพิวเตอร์วิทัศน์
- เพื่อออกแบบระบบที่สามารถบูรณาการเข้ากับโครงสร้างพื้นฐานของเมืองอัจฉริยะ สนับสนุนการจัดการจราจรและความปลอดภัยบนท้องถนน