




เจ้าของนวัตกรรม
นางสาว ภัทรวีร์ ธันยสิทธิโชติ
นักศึกษา
Details
DeHome เป็นแบบจำลองเชิงแนวคิดที่นำสถาปัตยกรรมคตินิยมเปลี่ยนแนวมาใช้ โดยการแยกองค์ประกอบพื้นฐานของบ้านมาจัดวางใหม่เพื่อสะท้อนความแตกกระจายและพลังของการเปลี่ยนแปลง
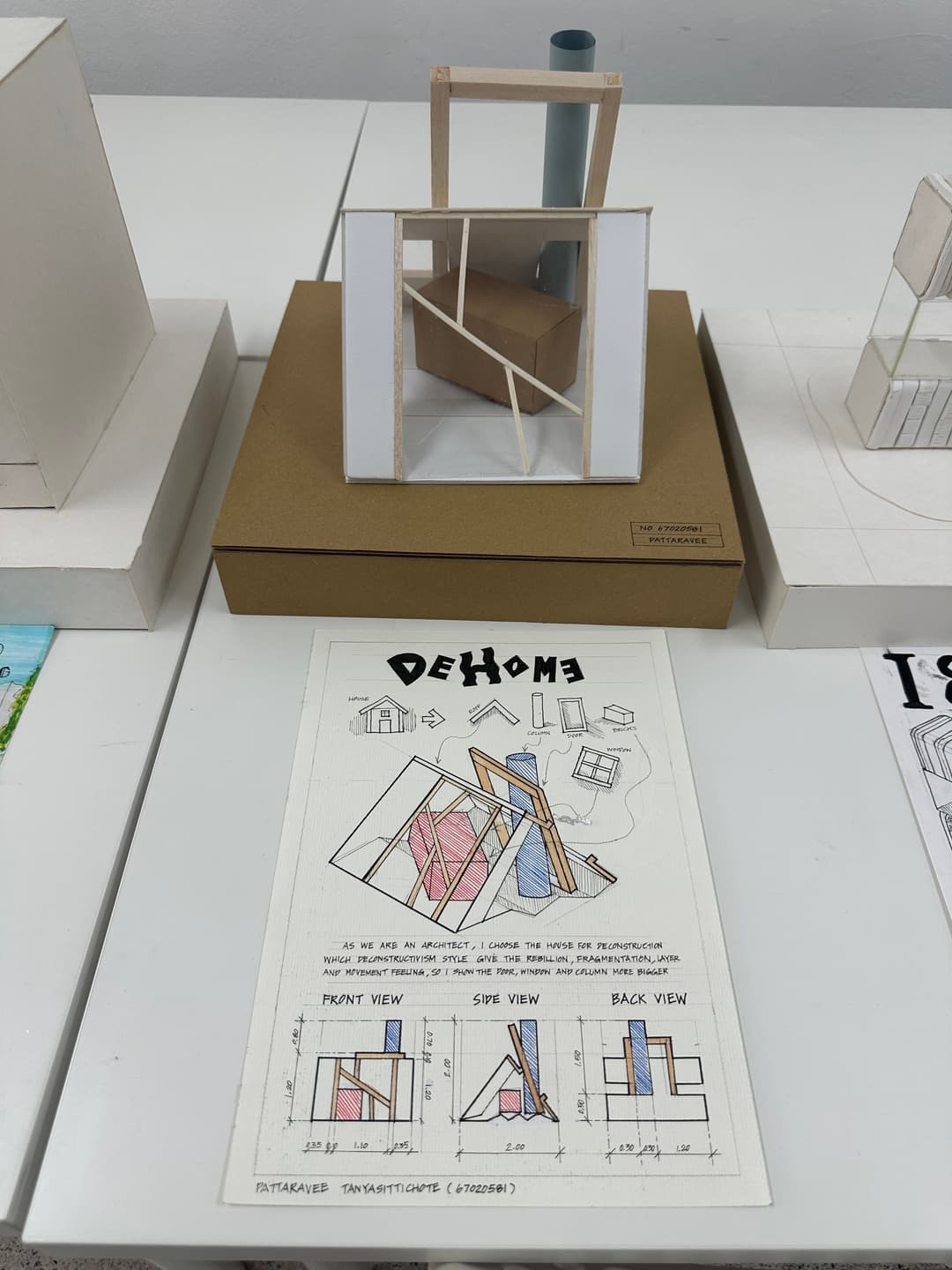
ชิ้นงานนี้เป็นแบบจำลองเชิงแนวคิด (conceptual model) ที่นำแนวคิดสถาปัตยกรรมคตินิยมเปลี่ยนแนว (Deconstructivism) มาใช้ในการออกแบบ ภายใต้ชื่อ "DeHome" ซึ่งมาจากคำว่า Deconstruction Home โดยทำการแยกองค์ประกอบพื้นฐานของบ้าน ได้แก่:
- หลังคา
- เสา
- ประตู
- หน้าต่าง
- อิฐ
องค์ประกอบเหล่านี้ถูกนำมาจัดวางใหม่ในรูปแบบที่สะท้อนความแตกกระจาย ขัดแย้ง และเคลื่อนไหว การออกแบบนี้ท้าทายแนวคิดดั้งเดิมของความมั่นคงของโครงสร้าง ผ่านการขยายขนาดขององค์ประกอบสำคัญ เช่น ประตู หน้าต่าง และเสา เพื่อเน้นความบิดเบี้ยวและพลังของการเปลี่ยนแปลง งานชิ้นนี้ไม่เพียงแค่รื้อโครงสร้างทางกายภาพของบ้าน แต่ยังเป็นการตีความใหม่ของแนวคิด "บ้าน" ในบริบทของสถาปัตยกรรมร่วมสมัยอีกด้วย
Objective
เพื่อศึกษาเอกลักษณ์และความงามของศิลปะยุคคตินิยมเปลี่ยนแนว (Deconstructivism) และนำมาประยุกต์ใช้ในงานออกแบบ
เพื่อศึกษาเอกลักษณ์และความงามของศิลปะยุคคตินิยมเปลี่ยนแนว (Deconstructivism) และนำมาประยุกต์ใช้ในงานออกแบบ