




เจ้าของนวัตกรรม
รศ.ดร. สุรพงษ์ สิริพงศ์ดี
อาจารย์ที่ปรึกษา
Details
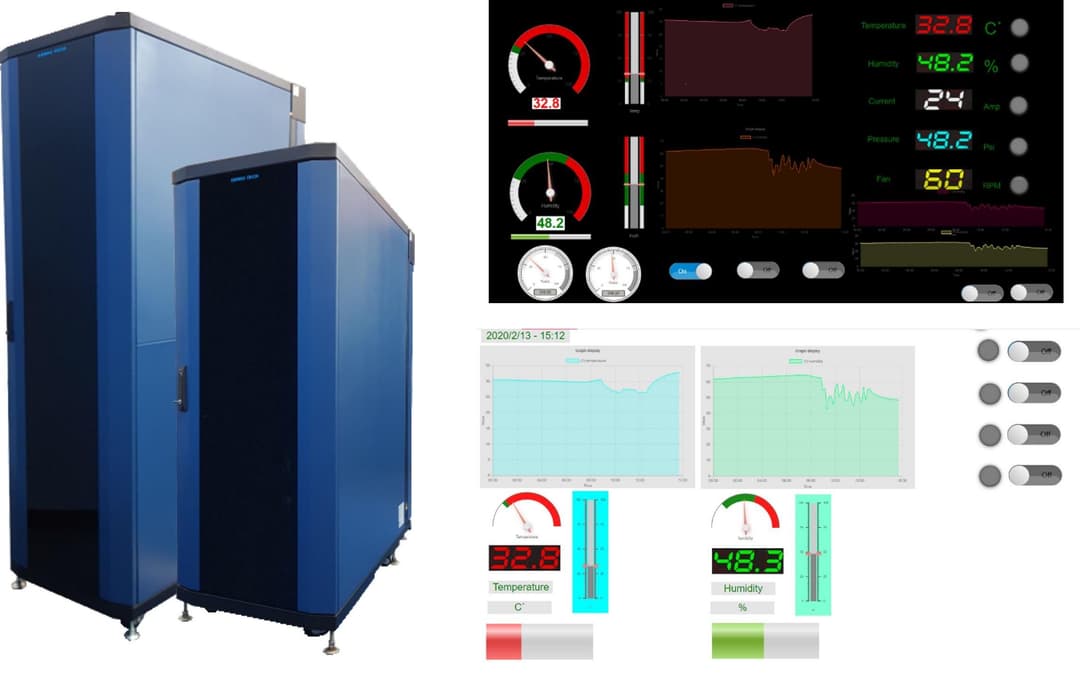
Air Rack เป็นผลิตภัณฑ์ที่ออกแบบมาเพื่อธุรกิจที่มีข้อจำกัดด้านพื้นที่และงบประมาณในการสร้างห้องเซิร์ฟเวอร์ ระบบช่วยให้ใช้งานอุปกรณ์ไอทีในพื้นที่เปิดได้อย่างมีประสิทธิภาพ พร้อมระบบควบคุมและติดตามข้อมูลผ่าน Dashboard จากระยะไกล
Air Rack เป็นผลิตภัณฑ์ที่ออกแบบมาเพื่อตอบโจทย์ธุรกิจที่มีข้อจำกัดด้านพื้นที่และงบประมาณในการสร้างห้องเซิร์ฟเวอร์ ระบบระบายความร้อน และการจัดการเสียงรบกวน ระบบนี้ช่วยให้สามารถใช้งานอุปกรณ์ไอทีในพื้นที่เปิดได้อย่างมีประสิทธิภาพ โดยรองรับทั้งการทำงานแบบ On-premise และ On-cloud ผ่านการแปลงข้อมูลจากเซ็นเซอร์เป็นข้อมูลดิจิทัลและแสดงผลผ่าน Dashboard ผู้ใช้สามารถควบคุม ติดตาม และวิเคราะห์ข้อมูลได้จากระยะไกล อีกทั้งระบบยังช่วยลดการใช้พลังงานไฟฟ้าและค่าใช้จ่ายในการบริหารจัดการห้องเซิร์ฟเวอร์แบบเดิมได้อย่างมีนัยสำคัญ
Objective
วัตถุประสงค์หลักของโครงการคือการลดการใช้พื้นที่ ลดการใช้พลังงานไฟฟ้า และปรับอุณหภูมิให้เหมาะสมกับการทำงานของอุปกรณ์ไอที
- ลดการใช้พื้นที่
- ลดการใช้ไฟฟ้า
- ปรับอุณหภูมิให้เหมาะสมกับอุปกรณ์ไอที