




Innovation Owner
Mr. NATTAPAT KULWATTHO
Student
Details
This study investigates brain activation during upper extremity motor control tasks using fNIRs and robotic arms. Findings indicate that movement types and force levels significantly influence brain activation in specific cortical regions.
Motor control is a critical process for muscle contraction, initiated by the motor cortex and vital for activities of daily living (ADLs). Disruptions in brain-muscle communication can impair movement, making the evaluation of brain-motor interaction essential for diagnosing disorders and developing brain-computer interfaces (BCIs).
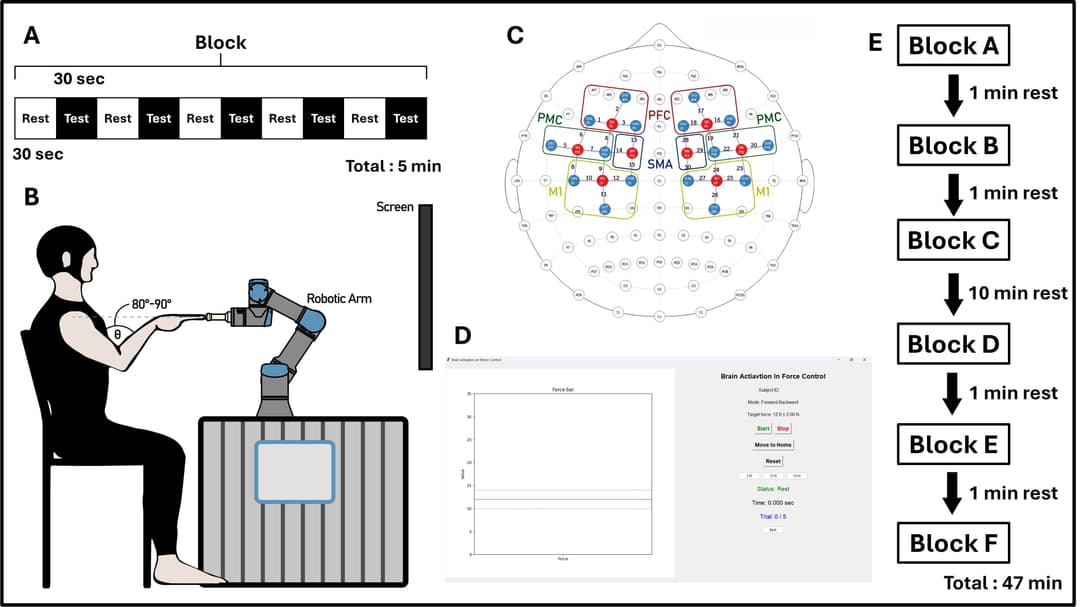
In this study, 18 healthy young adults performed motor control tasks using a robotic arm while hemodynamic signals were recorded via Functional Near-Infrared Spectroscopy (fNIRs):
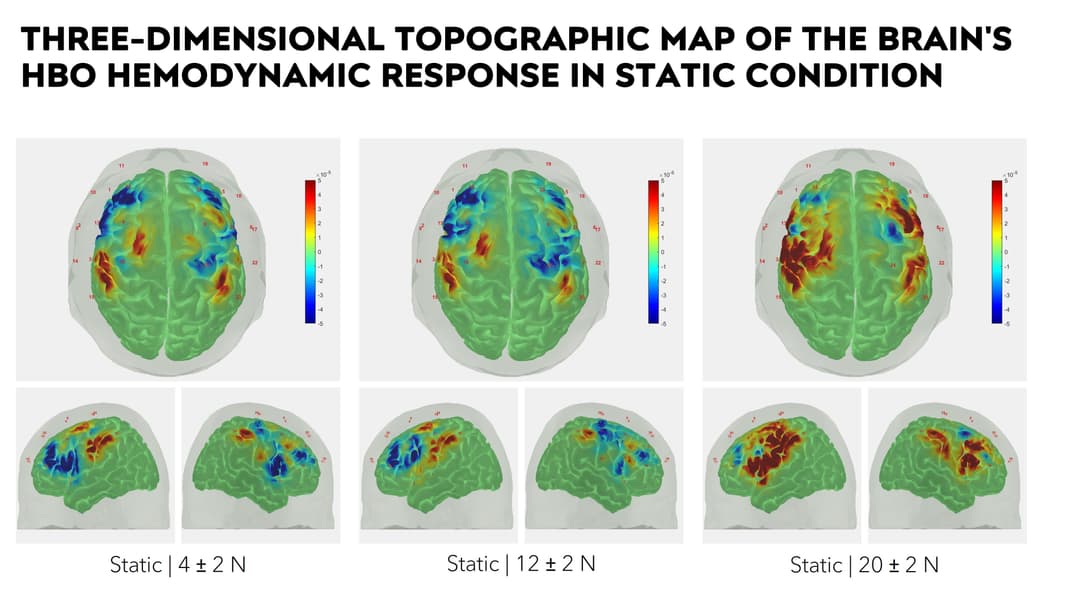
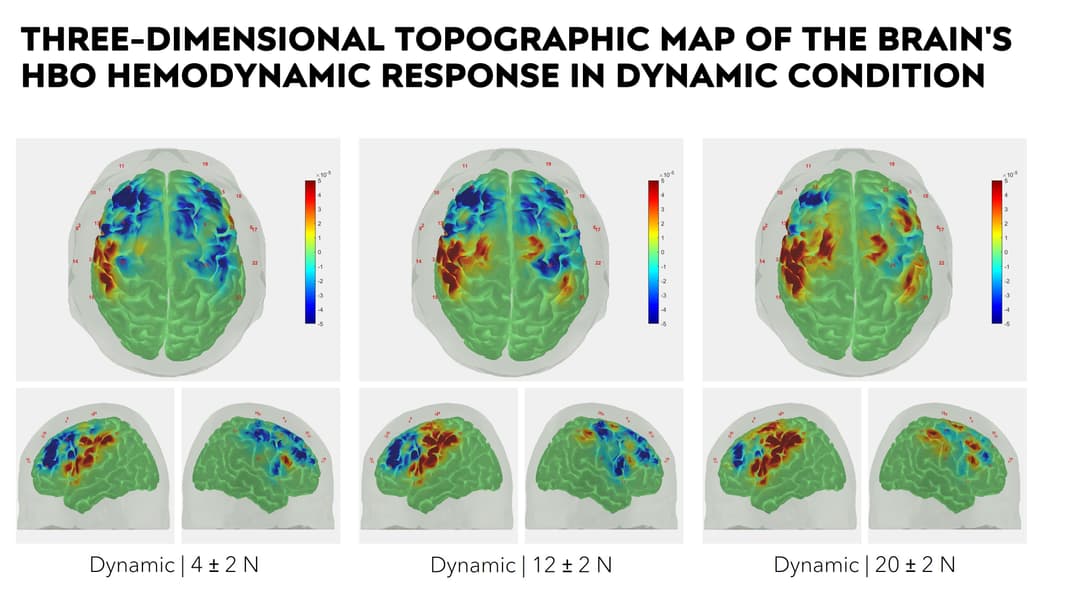
- Motion Types: Static and dynamic movements along a designated trajectory.
- Force Levels: 4, 12, and 20 N.
- Regions of Interest: Primary motor cortex (M1), premotor cortex (PMC), supplementary motor area (SMA), and prefrontal cortex (PFC).
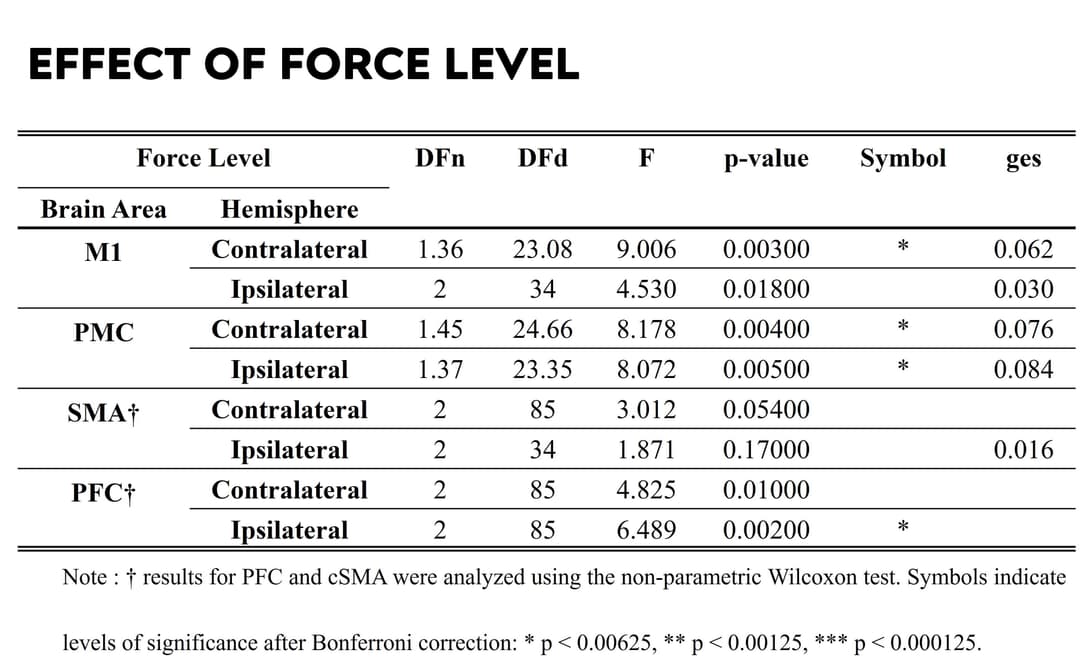
Results showed that movement type significantly affected activation in the prefrontal cortex (PFC), while force levels significantly influenced activation in the contralateral primary motor cortex (cM1), ipsilateral prefrontal cortex (iPFC), and the premotor cortex (PMC).

Objective
This study aims to investigate the relationship between brain activation in different regions and various upper extremity motor control tasks at different force levels to discern distinct patterns of brain activity.
This study aims to investigate the relationship between the brain activation of different brain regions and various upper extremity motor control tasks in controlling force at different force levels. Through the analysis of various brain responses to a range of upper extremity motor tasks by utilizing fNIRs and a robotic arm, the specific aim is to discern distinct patterns of brain activity linked to upper extremity motor control and force control.