




Innovation Owner
Mr. CHIRAT HEMARAT
Student
Details
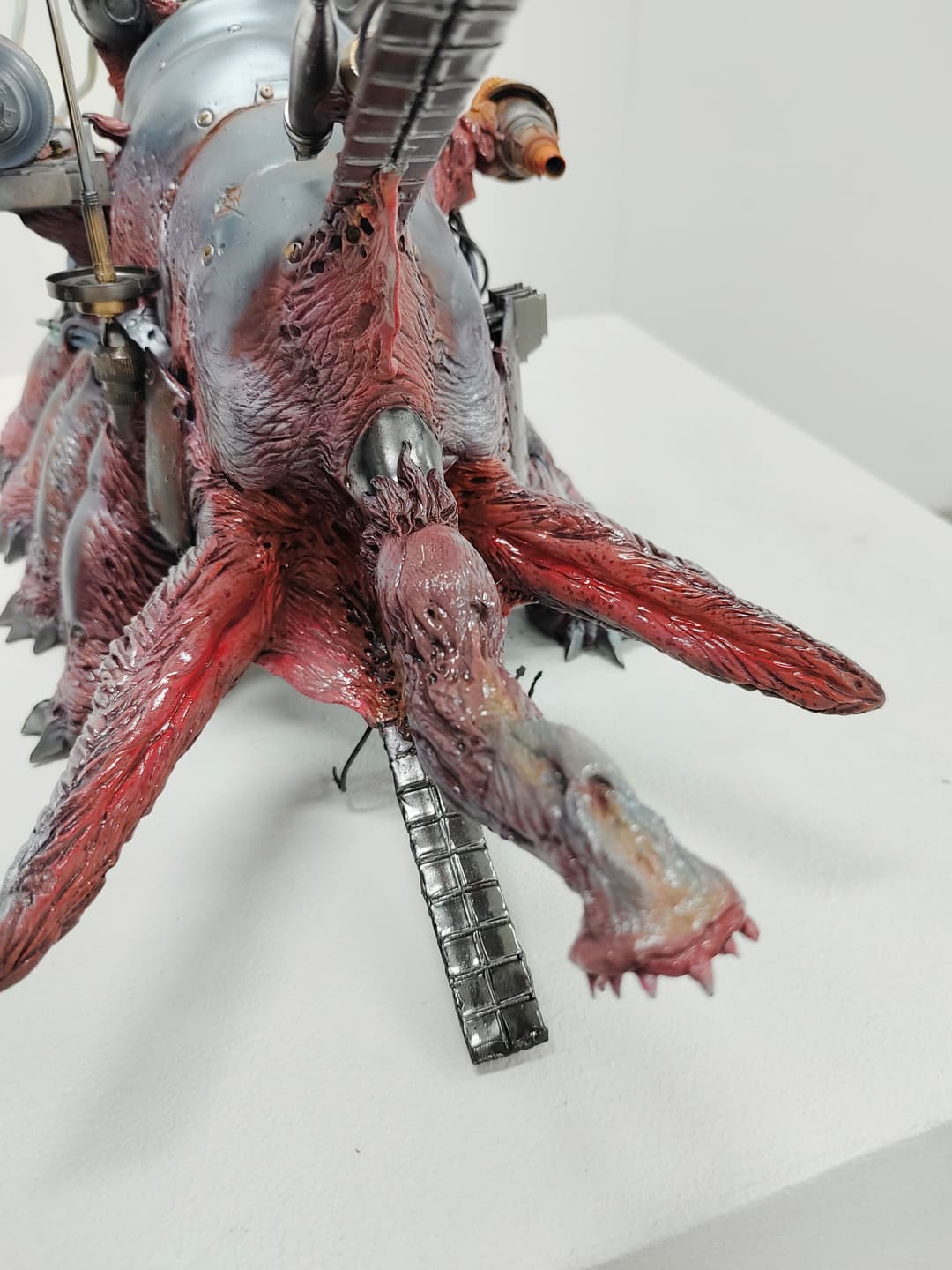
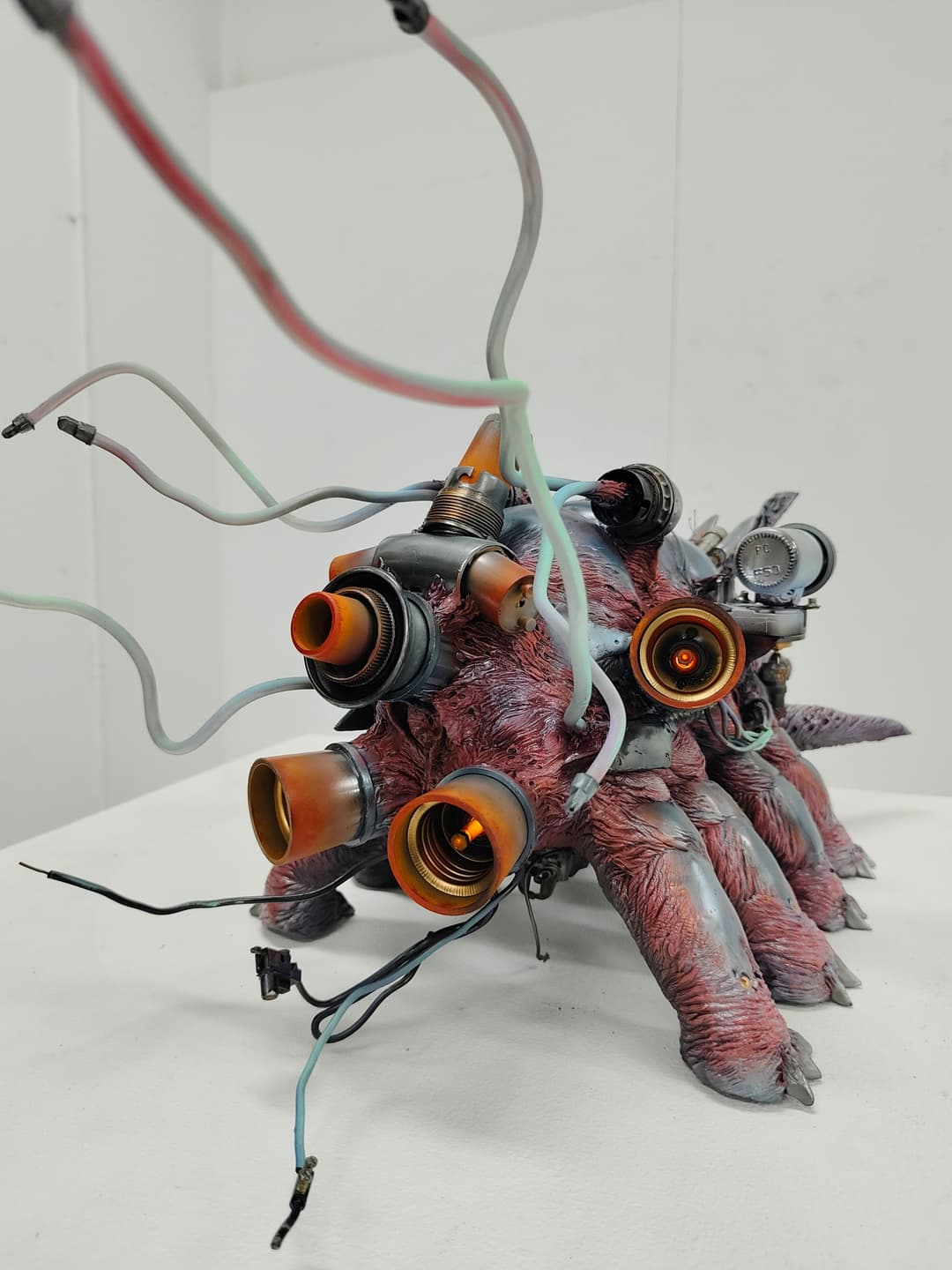
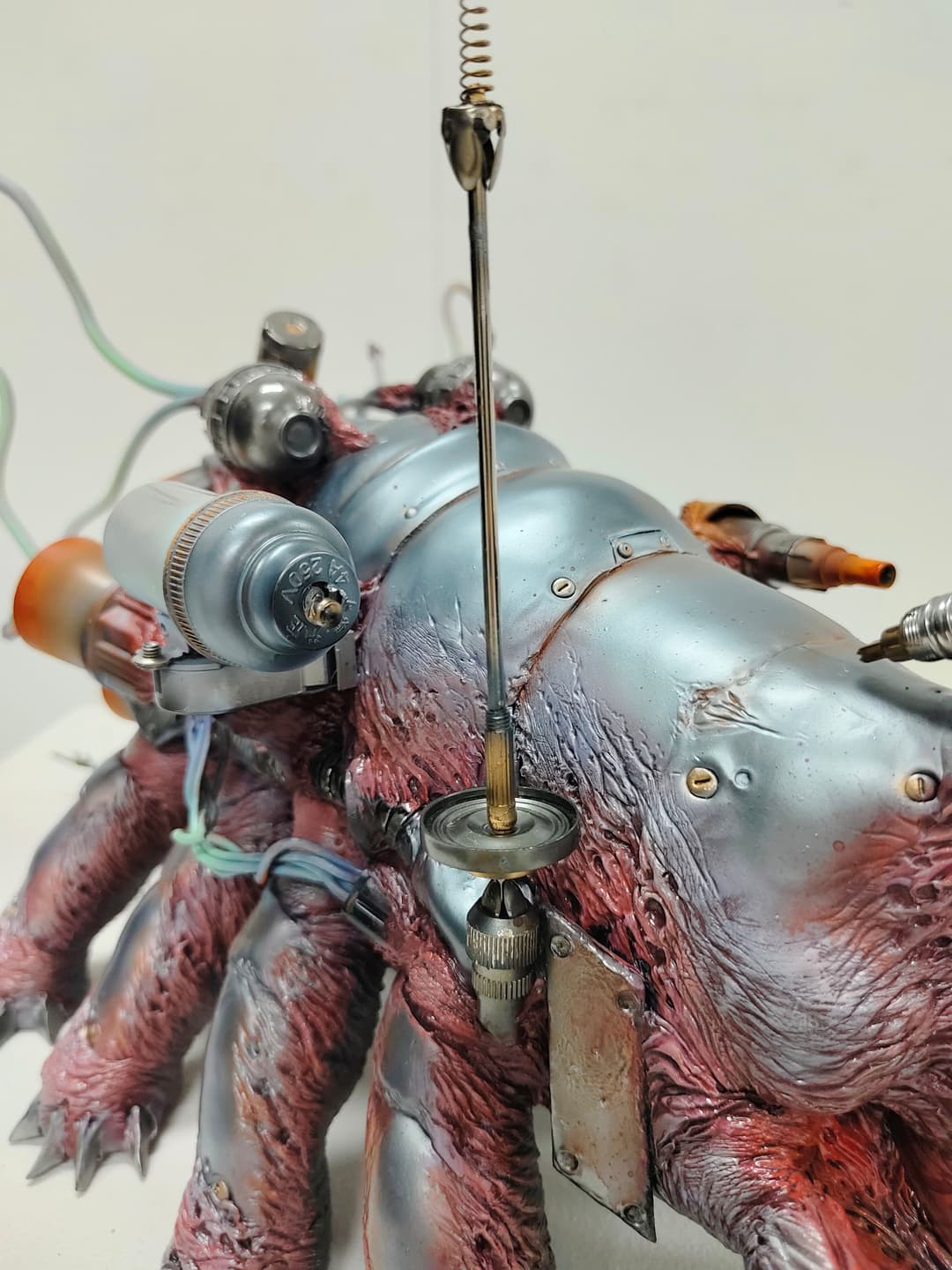
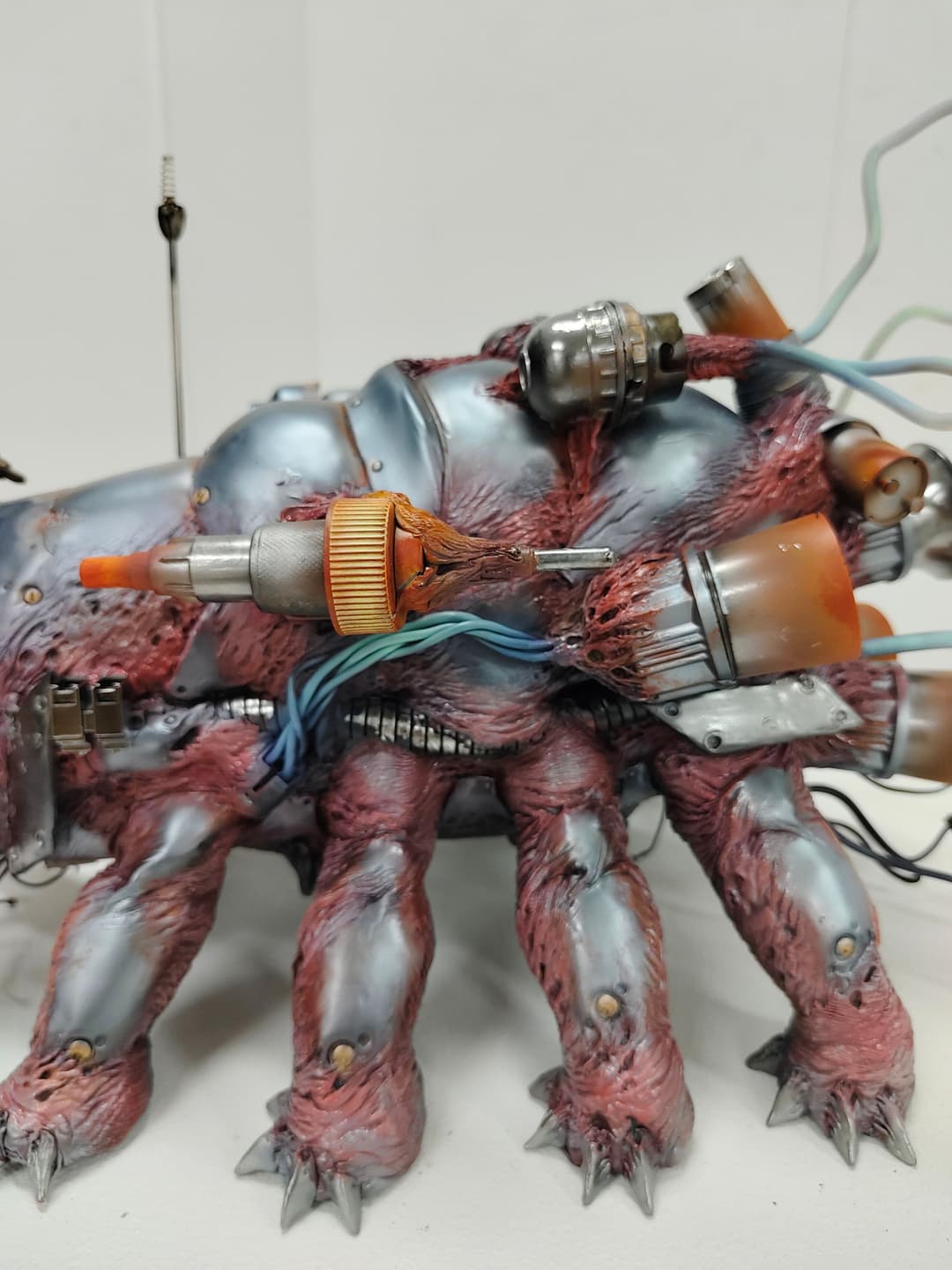
This concept explores the consequences of a teleportation error where matter fuses with a spacecraft. The tardigrade was chosen as the subject due to its proven ability to survive in space.
The concept for this work came from my curiosity about what would happen if, during interdimensional travel in space, a teleportation system were used. This system involves removing matter from one point and transferring it to another while maintaining its original state. If an error occurs and the matter is recreated or fused together, it could result in an experimental creature merging with the spacecraft.
I choose the tardigrade as the first experimental subject for teleportation because the water bear has already been sent into space and survived. Therefore, I thought that if we were to actually test this teleportation system, the tardigrade would likely be one of the creatures chosen for experimentation.







Objective
The objective is to translate various concepts and conspiracy theories into tangible artworks through imagination.
I want to translate various concepts and potential or impossible conspiracy theories into tangible works through my imagination.