



KMITL Expo 2025Cluster 2025ป. ตรี team projectชิ้นงาน
Design
Public
Park
Project
:
Saint
Chon
College
Campus
Park
คณะเทคโนโลยีการเกษตร, สำนักงานบริหารหลักสูตรสหวิทยาการเทคโนโลยีการเกษตร, วิทยาศาสตรบัณฑิต สาขาวิชาการออกแบบและการจัดการภูมิทัศน์เพื่อสิ่งแวดล้อม
AI Translated

Innovation Owner
SS
Mr. SIPPAWIT SAPIMPA
Student
Details
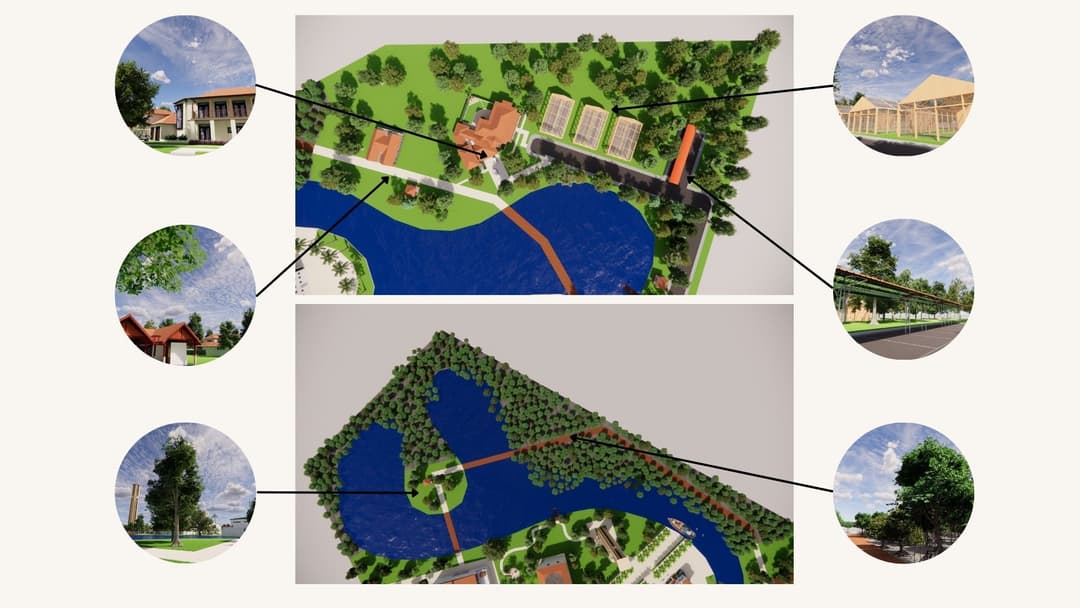
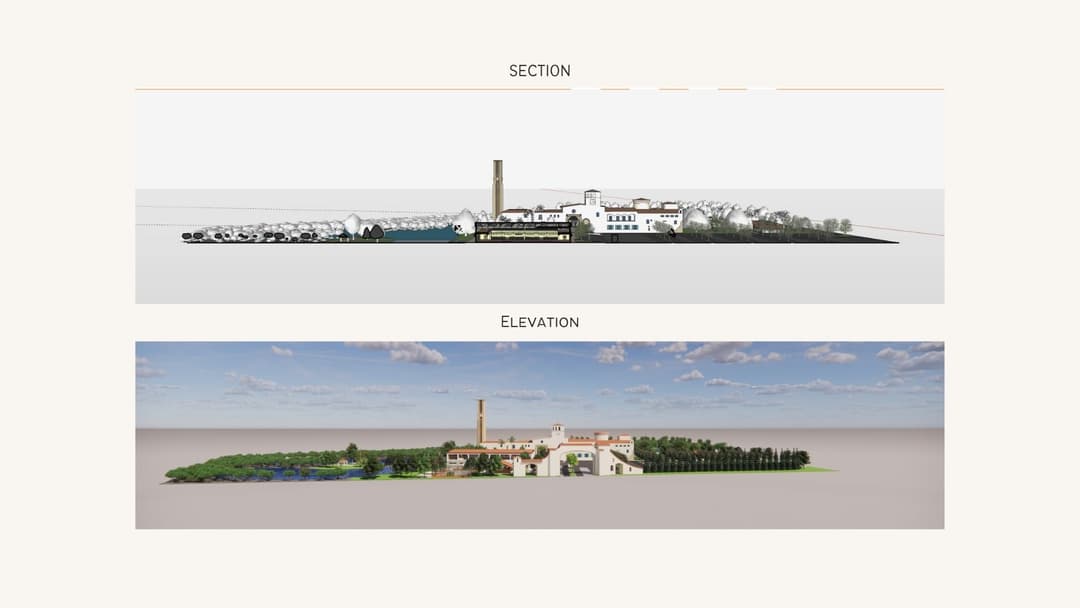
This project expands a public park design into a campus spanning over 50 rai in Ang Sila, Chonburi, serving as an educational institution and a recreational space for the local community.
Expanding from a public park design project to a campus design on an area of over 50 rai in Ang Sila Subdistrict, Mueang District, Chonburi Province, to serve as both an educational institution and a place for relaxation and learning for the surrounding people.







Objective
The objective of this project is to evaluate academic performance in the Public Park course through the design of a public park.
To evaluate academic performance in the Public Park course through the design of a public park.