




Innovation Owner
Miss ANCHISA CHAMNONNG
Student
Details
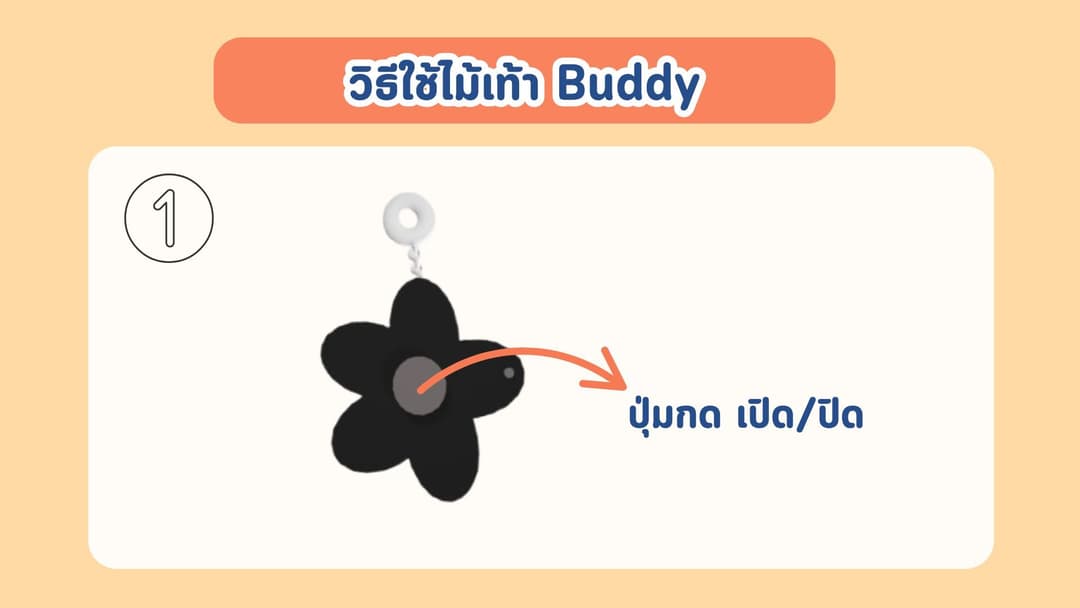
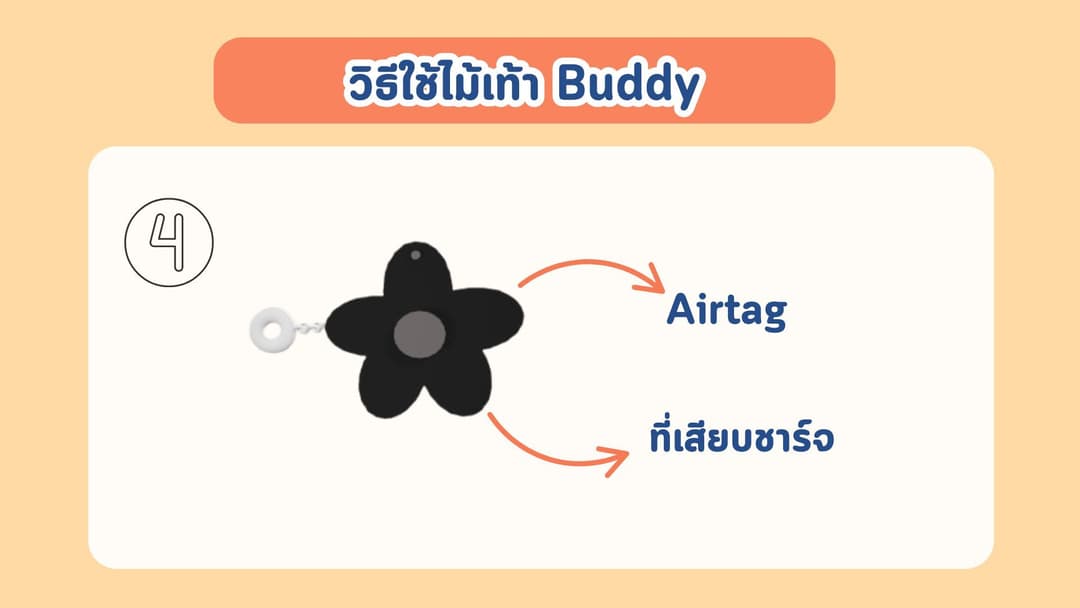
The Buddy Take Care walking stick supports the elderly and those recovering from injuries by enhancing mobility and safety. It features a one-touch folding mechanism, a portable flashlight, a medicine compartment, and an AirTag slot for maximum utility.
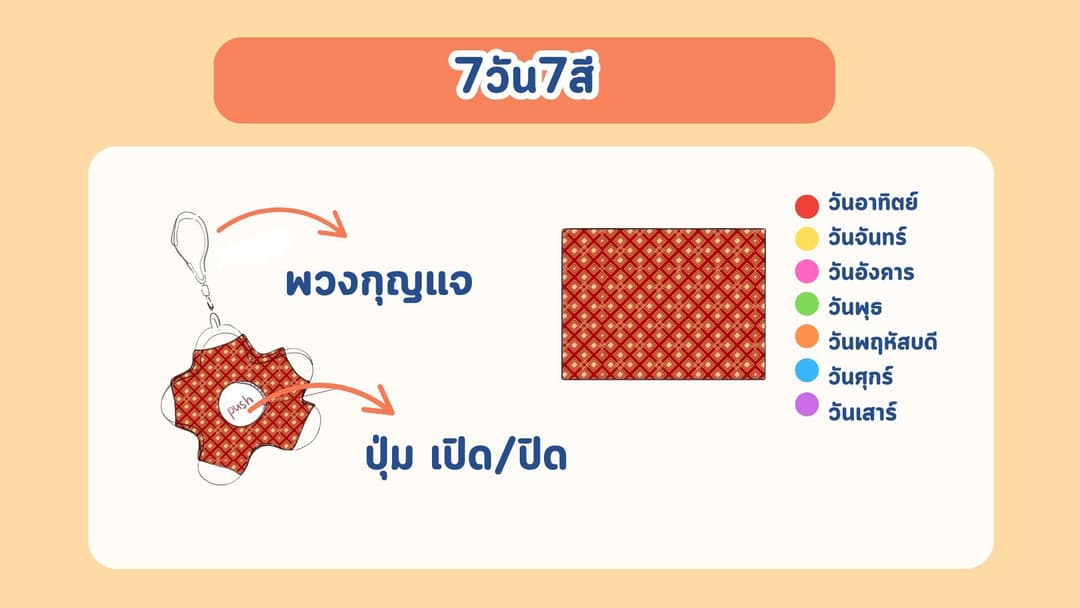
The "Buddy Take Care" walking stick is designed to physically support the elderly or individuals recovering from injuries, enabling convenient mobility, reducing the risk of falls, and enhancing walking safety. It is crafted as a keychain-style walking stick with a one-touch open-close mechanism. Building upon existing market products, the Buddy walking stick incorporates additional functionalities to maximize utility:
- Portable flashlight
- Medicine compartment
- AirTag slot
Its design prioritizes ease of use, convenience, and safety, specifically tailored for elderly users.



Objective
The objectives include designing a user-friendly walking stick for the elderly, improving portability through a foldable keychain design, reducing fatigue, and ensuring daily mobility safety.
- Design a walking stick suitable for elderly users.
- Increase portability with a foldable, keychain-style design.
- Help reduce fatigue from long-term use.
- Support safety and confidence in daily movement.