




Innovation Owner
Miss JURALAK BOONPATUANG
Student
Details
Biological control is an environmentally friendly approach to managing plant diseases. This project focuses on isolating and selecting antagonistic microorganisms to effectively inhibit pathogens, including those affecting durian, rice, and citrus crops.
Biological control (biocontrol) is an increasingly popular method for managing plant diseases due to its environmental benefits and safety for both farmers and consumers. The core of this approach is the use of antagonistic microorganisms to prevent pathogens from damaging crops. This project involves isolating microorganisms from various natural sources and selecting those effective against:
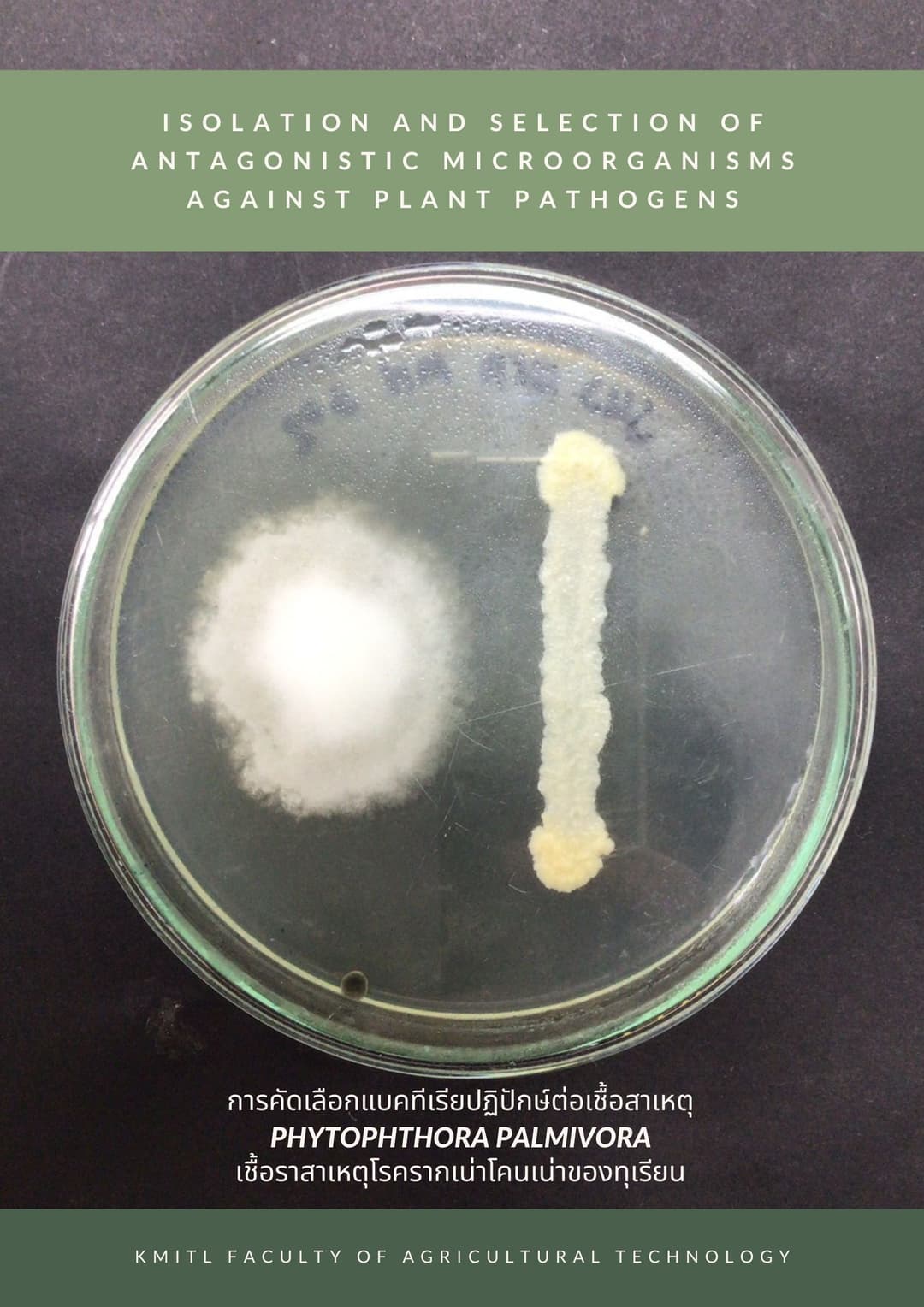
- Phytophthora palmivora (causative agent of durian root and stem rot)
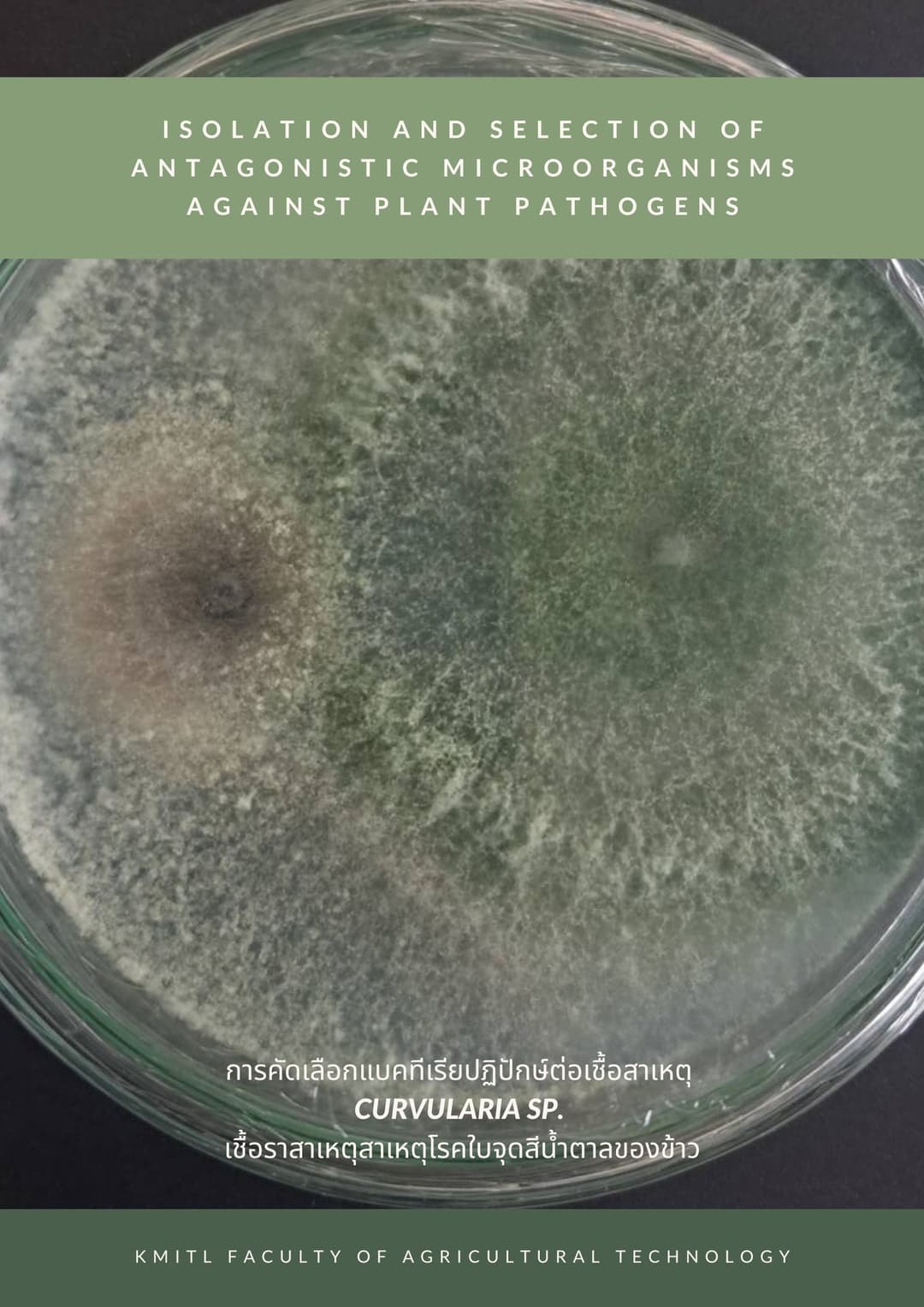
- Curvularia sp. (causative agent of rice brown leaf spot)
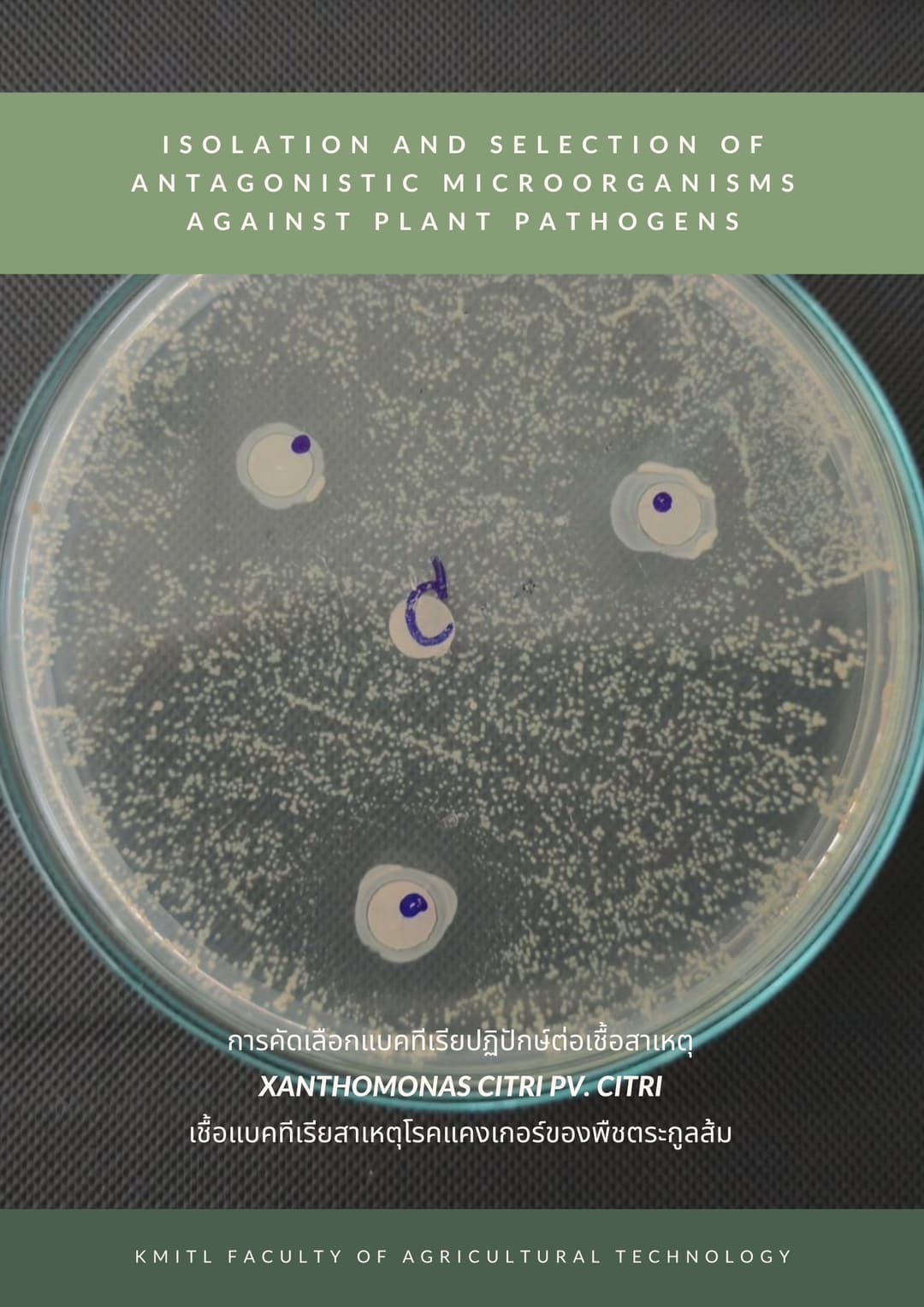
- Xanthomonas citri pv. citri (causative agent of citrus canker)
Objective
To obtain antagonistic microorganisms capable of inhibiting the growth of Phytophthora palmivora, Curvularia sp., and Xanthomonas citri pv. citri.
- To obtain antagonistic microorganisms that inhibit the growth of Phytophthora palmivora
- To obtain antagonistic microorganisms that inhibit the growth of Curvularia sp.
- To obtain antagonistic microorganisms that inhibit the growth of Xanthomonas citri pv. citri