กลับไปที่นวัตกรรมทั้งหมด
การจำลองระบบปฏิบัติการหุ่นยนต์
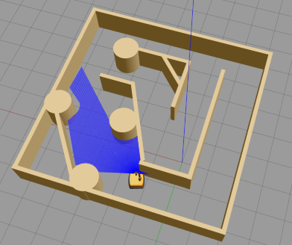
ROS Simulation
@คณะวิศวกรรมศาสตร์
#KLLC 2024
#Industry 4.0
รายละเอียด
โครงงาน ROS Simulation นำเสนอเกี่ยวกับการใช้ระบบปฏิบัติการหุ่นยนต์ที่เรียกว่า ROS2 (Robot Operating System 2) เพื่อจำลองและทดสอบการทำงานของหุ่นยนต์ในสภาพแวดล้อมเสมือนจริง โดยใช้การจำลองผ่านคอมพิวเตอร์เป็นตัวทดสอบ การจำลองนี้ช่วยให้ผู้วิจัยและนักพัฒนาสามารถทดสอบและปรับแต่งการทำงานของหุ่นยนต์ก่อนที่จะนำไปใช้งานจริง การใช้ ROS Simulation ช่วยลดเวลาและค่าใช้จ่ายในการพัฒนาหุ่นยนต์และเพิ่มประสิทธิภาพในการทดสอบ ผลลัพธ์จากโครงงานนี้มีการพัฒนาและปรับปรุงสมรรถนะของหุ่นยนต์ในสภาพแวดล้อมที่แท้จริง การใช้ ROS Simulation เป็นเครื่องมือที่มีประสิทธิภาพสูงสำหรับการพัฒนาและทดสอบหุ่นยนต์ในระบบทำงานอัตโนมัติ
วัตถุประสงค์
โปรเจค ROS Simulation มีที่มาจากการเพิ่มขึ้นของการใช้หุ่นยนต์ในหลายสาขาอุตสาหกรรมและงานวิจัย การพัฒนาและทดสอบหุ่นยนต์ในสภาพแวดล้อมทางกายมีความซับซ้อนและต้องใช้งานทรัพยากรมาก ROS Simulation จึงเป็นเครื่องมือที่มีประสิทธิภาพสูงในการลดความซับซ้อนนี้ โดยทำให้นักพัฒนาสามารถทดสอบและปรับปรุงหุ่นยนต์ในสภาพแวดล้อมเสมือนจริงก่อนการใช้งานจริง โดยความสำคัญนั้นประกอบไปด้วย -ลดความจำเป็นที่ต้องใช้สิ่งจำลองทางกายและลดค่าใช้จ่ายในการพัฒนาโปรแกรมและฮาร์ดแวร์ของหุ่นยนต์ -ทำให้นักพัฒนาสามารถลดเวลาในการพัฒนาและทดสอบการทำงานของหุ่นยนต์ก่อนการใช้งานจริง -ช่วยในการทดสอบการทำงานของหุ่นยนต์ได้อย่างมีประสิทธิภาพและรวดเร็ว, ช่วยจัดการกับปัญหาที่อาจเกิดขึ้นในระบบ
ผู้จัดทำ
ธรรศธร เชี่ยวธีรกุล
TASSATORN CHEOWTIRAKUL
#นักศึกษา
สมาชิก
จิราภรณ์ หนูสนธิ
CHIRAPHORN NOOSONTHI
#นักศึกษา
สมาชิก
ธนนันท์ อึ้งสิทธิพูนพร
THANANAN UENGSITTHIPOONPORN
#นักศึกษา
สมาชิก
เทพจิตร์ เชยโภคา
thepjit cheypoca
#อาจารย์
อาจารย์ที่ปรึกษา
โหวตนวัตกรรมนี้
กำลังดาวน์โหลด
Powered By KMITL Innovation Project