Details
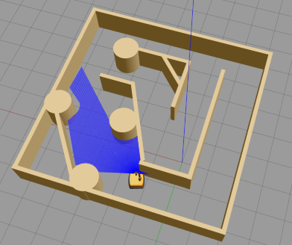
The project on ROS Simulation explores the use of the Robot Operating System 2 (ROS2) to simulate and test the operations of robots in a virtual environment. By Simulate through computer, this simulation allows researchers and developers to assess and fine-tune the robot's functionality before real-world deployment. The use of ROS Simulation aids in reducing development time and costs while enhancing testing efficiency. The results of this project involve the development and enhancement of the robot's capabilities in a simulated environment. ROS Simulation proves to be a highly effective tool for the development and testing of autonomous robotic systems.
Objective
โปรเจค ROS Simulation มีที่มาจากการเพิ่มขึ้นของการใช้หุ่นยนต์ในหลายสาขาอุตสาหกรรมและงานวิจัย การพัฒนาและทดสอบหุ่นยนต์ในสภาพแวดล้อมทางกายมีความซับซ้อนและต้องใช้งานทรัพยากรมาก ROS Simulation จึงเป็นเครื่องมือที่มีประสิทธิภาพสูงในการลดความซับซ้อนนี้ โดยทำให้นักพัฒนาสามารถทดสอบและปรับปรุงหุ่นยนต์ในสภาพแวดล้อมเสมือนจริงก่อนการใช้งานจริง โดยความสำคัญนั้นประกอบไปด้วย -ลดความจำเป็นที่ต้องใช้สิ่งจำลองทางกายและลดค่าใช้จ่ายในการพัฒนาโปรแกรมและฮาร์ดแวร์ของหุ่นยนต์ -ทำให้นักพัฒนาสามารถลดเวลาในการพัฒนาและทดสอบการทำงานของหุ่นยนต์ก่อนการใช้งานจริง -ช่วยในการทดสอบการทำงานของหุ่นยนต์ได้อย่างมีประสิทธิภาพและรวดเร็ว, ช่วยจัดการกับปัญหาที่อาจเกิดขึ้นในระบบ
Project Members
ธรรศธร เชี่ยวธีรกุล
TASSATORN CHEOWTIRAKUL
#นักศึกษา
Member
จิราภรณ์ หนูสนธิ
CHIRAPHORN NOOSONTHI
#นักศึกษา
Member
ธนนันท์ อึ้งสิทธิพูนพร
THANANAN UENGSITTHIPOONPORN
#นักศึกษา
Member
เทพจิตร์ เชยโภคา
thepjit cheypoca
#อาจารย์
Advisor
Vote for this Innovation!
Loading...
Powered By KMITL Innovation Project